巨磁电阻效应及其应用-数据处理
本作品内容为巨磁电阻效应及其应用-数据处理,格式为 docx ,大小 55747 KB ,页数为 10页
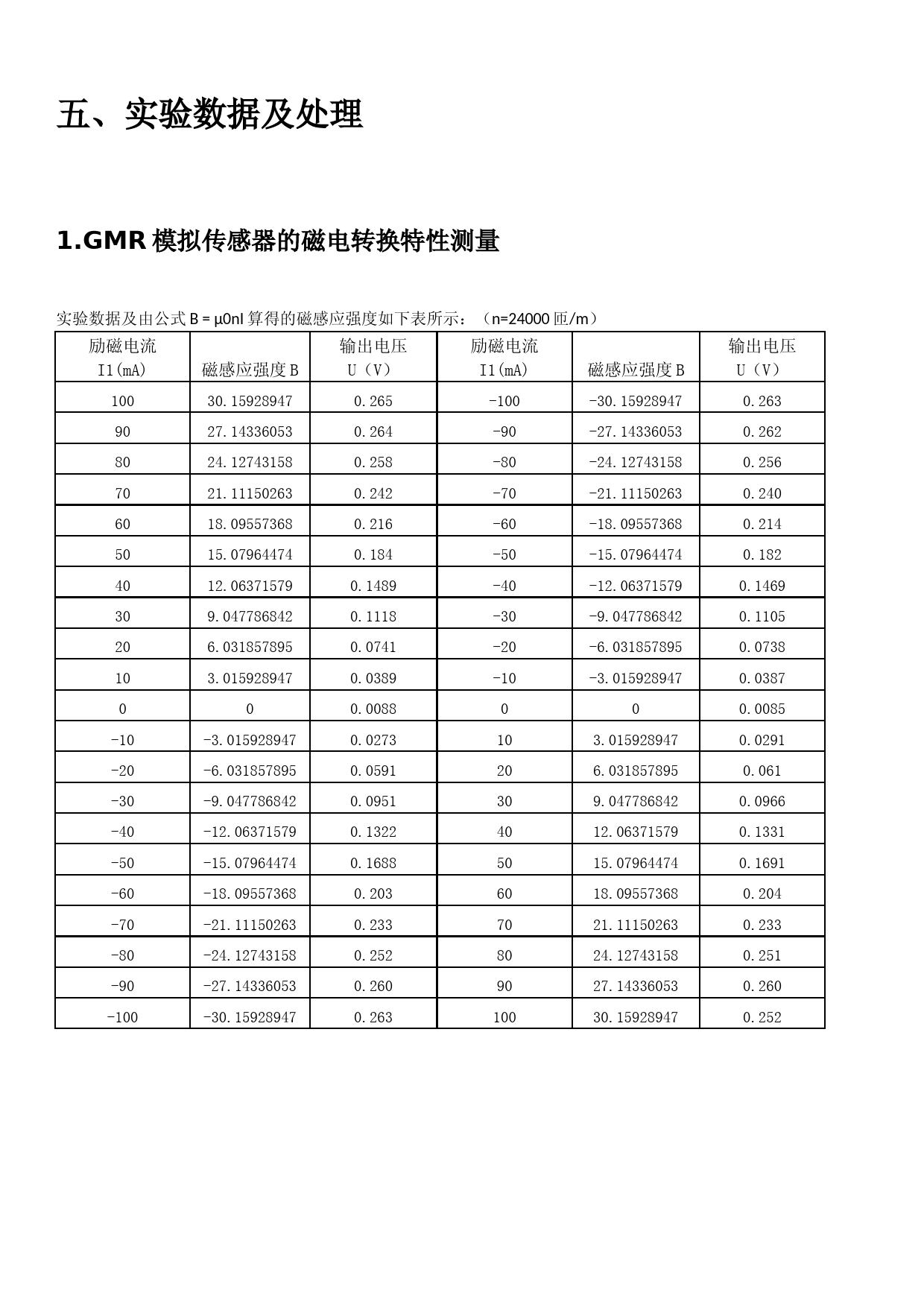
('五、实验数据及处理1.GMR模拟传感器的磁电转换特性测量实验数据及由公式B=μ0nI算得的磁感应强度如下表所示:(n=24000匝/m)励磁电流I1(mA)磁感应强度B输出电压U(V)励磁电流I1(mA)磁感应强度B输出电压U(V)10030.159289470.265-100-30.159289470.2639027.143360530.264-90-27.143360530.2628024.127431580.258-80-24.127431580.2567021.111502630.242-70-21.111502630.2406018.095573680.216-60-18.095573680.2145015.079644740.184-50-15.079644740.1824012.063715790.1489-40-12.063715790.1469309.0477868420.1118-30-9.0477868420.1105206.0318578950.0741-20-6.0318578950.0738103.0159289470.0389-10-3.0159289470.0387000.0088000.0085-10-3.0159289470.0273103.0159289470.0291-20-6.0318578950.0591206.0318578950.061-30-9.0477868420.0951309.0477868420.0966-40-12.063715790.13224012.063715790.1331-50-15.079644740.16885015.079644740.1691-60-18.095573680.2036018.095573680.204-70-21.111502630.2337021.111502630.233-80-24.127431580.2528024.127431580.251-90-27.143360530.2609027.143360530.260-100-30.159289470.26310030.159289470.252以B为横坐标,输出电压U为纵坐标,作图得:-40-30-20-1001020304000.050.10.150.20.250.3磁场减小时B-U关系曲线磁感应强度B与输出电压U之间的关系曲线磁感应强度B(G)输出电压U(V)误差分析:(1)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内,反应在图像上就是最低处的输出都在y轴上,实际上应当是分别分布在y轴左右两侧的;(2)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;(3)使用Excel表格处理数据的过程中可能会有精度损失;2.GMR的磁阻特性曲线的测量根据实验数据由公式B=μ0nI算得的磁感应强度,由R=U/I算得的电阻如下表所示:(磁阻两端电压U=4V)励磁电流I1(mA)磁感应强度B磁阻电流I(mA)磁阻R(Ω)10030.159289471.9852015.113359027.143360531.9822018.1634718024.127431581.9792021.222847021.111502631.9622038.7359846018.095573681.9352067.1834635015.079644741.9022103.0494224012.063715791.8682141.327623309.0477868421.8332182.214948206.0318578951.7982224.694105103.0159289471.7672263.723826001.7392300.172513-10-3.0159289471.7512284.408909-20-6.0318578951.782247.191011-30-9.0477868421.8132206.287921-40-12.063715791.8482164.502165-50-15.0796447422123.142251-60-18.095573681.9182085.505735-70-21.111502631.952051.282051-80-24.127431581.972030.456853-90-27.143360531.9812019.182231-100-30.159289471.9812019.182231励磁电流I1(mA)磁感应强度B磁阻电流I(mA)磁阻R(Ω)-100-30.159289471.9812019.182231-90-27.143360531.982020.20202-80-24.127431581.9722028.397566-70-21.111502631.9582042.900919-60-18.095573681.932072.53886-50-15.079644741.9012104.155708-40-12.063715791.8632147.074611-30-9.0477868421.8322183.406114-20-6.0318578951.7982224.694105-10-3.0159289471.7682262.443439001.7392300.172513103.0159289471.7592274.019329206.0318578951.7882237.136465309.0477868421.8212196.5952774012.063715791.8552156.3342325015.079644741.892116.4021166018.095573681.9242079.0020797021.111502631.9552046.0358068024.127431581.9712029.4266879027.143360531.9812019.18223110030.159289471.9832017.145739作图如下:-40-30-20-1001020304018501900195020002050210021502200225023002350"磁场减小时R-B关系曲线""磁场增大时R-B关系曲线"磁感应强度B(G)磁阻R(Ω)磁阻与磁感应强度关系曲线误差分析:(1)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内,反应在图像上就是最高处的输出都在y轴上,实际上应当是分别分布在y轴左右两侧的;(2)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;(3)使用Excel表格处理数据的过程中可能会有精度损失;3.GMR开关(数字)传感器的磁电转换特性曲线测量实验数据及由公式B=μ0nI算得的磁感应强度如下表所示:高电平:1V,低电平:-1V减小磁场增大磁场开关动作励磁电流/mA磁感应强度/G开关动作励磁电流/mA磁感应强度/G关13.34.0111855关16.14.855645605开-18.1-5.458831395开-16.3-4.915964184作图如下:-20-15-10-50510152000.20.40.60.811.2磁场减小时巨磁阻开关特性曲线磁场增大时巨磁阻开关特性曲线磁感应强度B(G)输出电压U(V)开关特性曲线误差分析:(1)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内;(2)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;(3)使用Excel表格处理数据的过程中可能会有精度损失;4.用GMR传感器测量电流低磁偏置25mV励磁电流I(mA)输出电压U(mV)励磁电流I(mA)输出电压U(mV)30024.9-3002120024.3-20021.710023.6-10022.3023022.9-10022.410023.6-20021.720024.3-3002130024.9适当磁偏置150mV励磁电流I(mA)输出电压U(mV)励磁电流I(mA)输出电压U(mV)300149.6-300144.5200149-200145.4100148.1-100146.30147.30147.2-100146.3100148.2-200145.4200149.2-300144.5300150.1作图如下-400-300-200-10001002003004001920212223242526低磁偏置减小电流低磁偏置增加电流输出电压U(mV)励磁电流I(mA)待测电流与输出电压关系曲线-400-300-200-1000100200300400141142143144145146147148149150151适当磁偏置减小电流适当磁偏置增加电流励磁电流I(mA)输出电压U(mV)待测电流与输出电压关系曲线误差分析:(1)操作中,设置低磁偏置和适当磁偏置时,由于输出电压对偏置磁铁的位置变动很灵敏,故初始磁偏置时的输出电压距离要求会有误差;(2)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内;(3)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;(4)使用Excel表格处理数据的过程中可能会有精度损失;(5)测量适当磁偏置时,减小励磁电流时的初始电流300mA对应的输出电压偏离直线较多,可能由于操作原因,比如偏置磁铁的不稳定或触碰等。5.GMR梯度传感器的特性及应用起始角度/度687174778083868992转动角度/度03691215182124输出电压/mV030.955.942.2-12.3-50.8-49.5-25.4-1起始角度/度929598101104107110113116转动角度/度242730333639424548输出电压/mV-12752.933.9-11.1-47.3-48.7-27.3-5.9作图如下0102030405060-60-40-20020406080转动角度与输出电压间的关系曲线转动角度与输出电压间的关系曲线转动角度(度)输出电压(mV)误差分析:(1)转动齿轮时,由于每次转动的幅度很小,由于操作原因会有转动的角度误差存在;(2)转动齿轮后读数时,会有因读数造成的角度误差存在;6.通过实验了解磁记录与读出的原理实验数据如下表所示:十进制数211二进制数11010011磁卡区域号01234567读出电平(V)1.9511.9510.0041.9510.0040.0041.9511.951误差分析:(1)设置的二进制数据写入时,磁卡区域可能未严格对齐;GMR传感器在有关领域的应用实例:基于GMR传感器阵列的生物检测:GMR传感器比电子传感器更灵敏、可重复性强,具有更宽的工作温度、工作电压和抗机械冲击、震动的优异性能,而且GMR传感器的工作点也不会随时间推移而发生偏移。GMR传感器的制备成本和检测成本低,对样本的需求量很小。由GMR传感器组成的阵列,还可以结合现有的IC工艺,提高整体设备的集成度,进行多目标的检测。同时,对比传统的荧光检测法,磁性标记没有很强的环境噪声,标记本身不会逐渐消退,也不需要昂贵的光学扫描设备以及专业的操作人员。测量原理:GMR阵列传感器生物检测的基本模式用GMR阵列传感器进行生物检测,是以磁性颗粒为标记物,采用直接标记法或两步标记法,在施加一定方向的外加磁场的情况下,用磁敏传感器对磁性标记产生的寄生磁场进行检测,从而实现对生物目标定性定量分析。测量方法:以DNA检测为例,第一步将已知序列的DNA探针链结合在包埋了自旋阀传感器的芯片表面,加入用生物素标记的DNA目标链溶液,进行充分杂交;第二步,加入被抗生物素包裹的磁性颗粒,形成生物素一抗生物素共价键,从而选择性地捕获磁性标记。标记反应完成后,用外加梯度磁场将未参与标记的多余磁性颗粒分离,再施加激励磁场将磁标记(磁性颗粒)磁化,磁化的磁标记产生的寄生磁场引起传感器阻值的变化,从而导致反映生物反应的信号输出。',)
提供巨磁电阻效应及其应用-数据处理会员下载,编号:1700789244,格式为 docx,文件大小为10页,请使用软件:wps,office word 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载