自动控制原理知识点归纳PPT课件
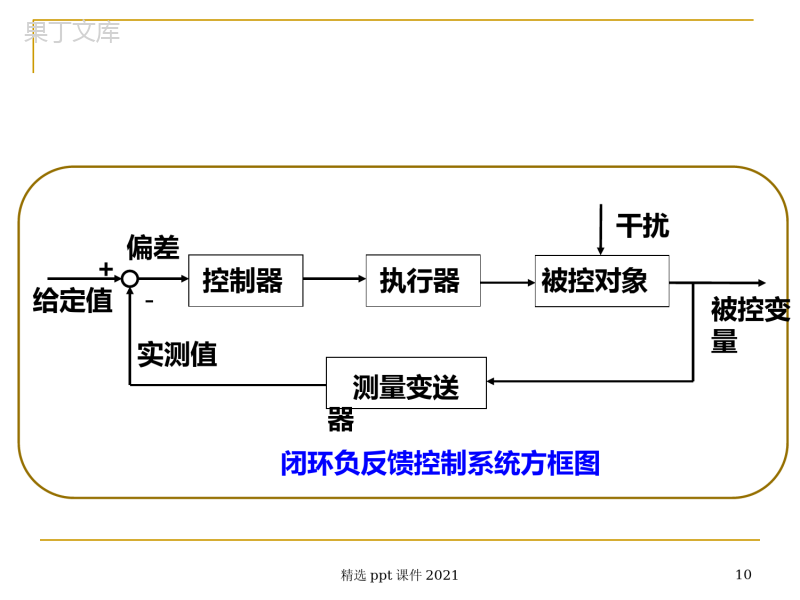
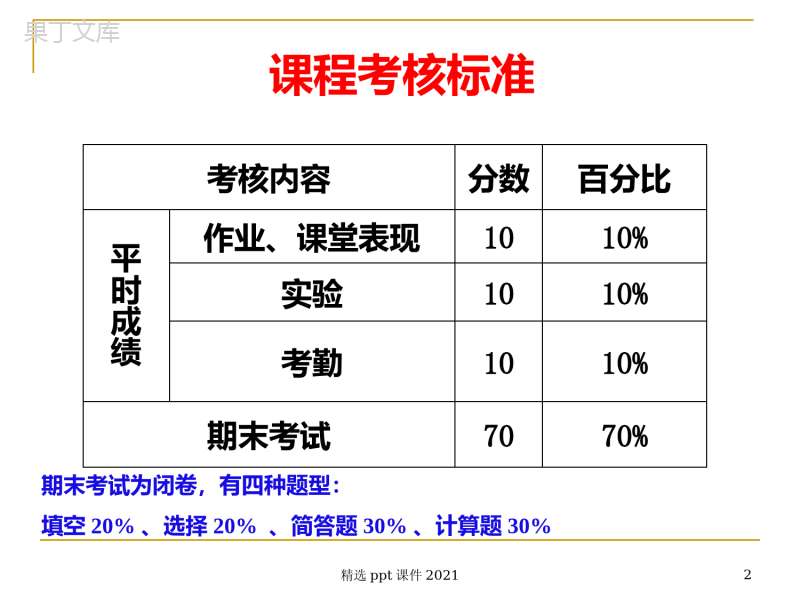
精选ppt课件20211自动控制原理精选ppt课件20212课程考核标准考核内容分数百分比平时成绩作业、课堂表现1010%实验1010%考勤1010%期末考试7070%期末考试为闭卷,有四种题型:填空20%、选择20%、简答题30%、计算题30%精选ppt课件20213目录基本控制形式(基本控制形式(22种)、基本组成(种)、基本组成(44部分)、基本信号(部分)、基本信号(55种)考察方式:填空题、综合题种)考察方式:填空题、综合题准、快)考察方式:填空题、准、快)考察方式:填空题、综合题综合题型的形式型的形式————微分方程、传递函数、结构图考察方式:填空题微分方程、传递函数、结构图考察方式:填空题考察方式:填空题考察方式:填空题函数考察方式:填空题函数考察方式:填空题路的传递函数考察方式:综合题的传递函数考察方式:综合题联、反馈的等效变换考察方式:综合题联、反馈的等效变换考察方式:综合题精选ppt课件20214目录线性系统稳定性分析的三种方法线性系统稳定性分析的三种方法————特征方程的特征根在特征方程的特征根在ss左半平面,劳左半平面,劳、奈奎斯特判据考察方式:填空题、奈奎斯特判据考察方式:填空题特征方程考察方式:选择、综合题特征方程考察方式:选择、综合题劳斯判据考察方式:综合题,难度同例劳斯判据考察方式:综合题,难度同例3.93.9性能指标计算(超调量和调节时间)考察方式:综合题,难度同例性能指标计算(超调量和调节时间)考察方式:综合题,难度同例3.83.8和和00精选ppt课件20215目录是确定是确定ss平面上根轨迹的充分必要条件,就是说,绘制根轨迹时,可用相角条件确定根轨迹上的点,用模值条件确定根轨迹上该点对应的平面上根轨迹的充分必要条件,就是说,绘制根轨迹时,可用相角条件确定根轨迹上的点,用模值条件确定根轨迹上该点对应的KK值。考察方式:选择题值。考察方式:选择题德图。考察方式:填空、选择题德图。考察方式:填空、选择题察方式:选择题察方式:选择题性分析系统的性能。考察方式:选择题性分析系统的性能。考察方式:选择题6.26.2基本控制规律。考察方式:填空、选择题基本控制规律。考察方式:填空、选择题串联超前、滞后、滞后串联超前、滞后、滞后--超前校正、复合校正。考察方式:选择题超前校正、复合校正。考察方式:选择题精选ppt课件20216第一章自动控制系统的基本控制形式(2种)、基本组成(4部分)、基本信号(5种)考察方式:填空题、综合题性能指标(稳、准、快)考察方式:填空题、综合题精选ppt课件20217自动控制系统基本控制形式(2种)入量,系统就自动纠偏。由于闭环系统是根据负反馈原理按偏差进行控制的,因此又叫反馈控制或偏差控制。精选ppt课件20218开环控制和闭环控制的优缺点比较在开环系统中,系统的输出只受输入的控制,控制精度和抑制干扰的特性都相对比较差,但是由于没有反馈的作用,开环控制系统反应较快。闭环控制系统是建立在反馈原理基础之上的,利用输出量同期望值的偏差,对系统进行控制,可获得比较好的控制性能,但是闭环控制系统由于反馈作用,一般有个调节过程,动态响应相对较慢,如果参数设计不合理,可能使系统不稳定而出现振荡。通常大多数重要的自动控制系统都采用闭环控制方式。精选ppt课件20219自动控制系统的组成(4个)被控对象:指被控制的设备或过程,如智能车、传热过程等;测量元件:测量智能系统中需要控制的物理量,如果这个物理量是非电量,一般需要转化为电量;执行元件:直接作用于被控对象,使被控量发生变化达到预期的控制目的,如电动机、半导体开关等;控制器:指结构或参数便于调整的元件,用于改善系统性能。精选ppt课件202110闭环负反馈控制系统方框图(重点)给定值被控变量干扰控制器测量变送器执行器被控对象+偏差实测值-闭环负反馈控制系统方框图精选ppt课件202111自动控制系统中传递的信号(5种)给定值:智能系统预期输出的物理量;被控变量:智能系统中被控制的物理量,它与给定信号之间保持一定的函数关系;实测值:由测量元件将输出端获得的信号反向送回输入端的信号,也称为反馈信号;偏差:给定值和反馈信号之差;干扰:所有妨碍控制器对被控变量按要求进行控制的信号。精选ppt课件2021121.4自动控制系统的性能指标对控制系统的性能评价,多以动态过程的特性来衡量,工程上对自动控制系统性能的基本要求可以归结为稳(稳定性和平稳性)、准(准确性)和快(快速性)。精选ppt课件202113设第一个波振幅为y1、第三个波振幅为y3设定值为阶跃信号的响应曲线yry1y3Cy(∞)TpTSTt13yny131yy11yn1)衰减比n和衰减率ψ衰减比在4:1到10:1之间时,过渡过程的衰减程度合适,过渡过程较短。精选ppt课件202114最大动态偏差A表示系统瞬间偏离给定值的最大程度;超调量σ是第一个波振幅与最终稳态值y(∞)之比。设定值为阶跃信号的响应曲线yry1y3Cy(∞)TpTSTtA2)最大动态偏差A和超调量σ1y100%y()A=ymax-r精选ppt课件202115过渡过程结束后,被控参数的稳态值y(∞)与设定值之间的残余偏差叫做余差,也称静差。是衡量控制系统稳态准确性的指标。C=y(∞)-r设定值为阶跃信号的响应曲线yry1y3Cy(∞)TpTSTt3)余差C精选ppt课件202116Ts是指从过渡过程开始到过渡过程结束所需的时间。当被控参数与稳态值间的偏差进入稳态值的±5%(或±2%)范围内,就认为过渡过程结束。设定值为阶跃信号的响应曲线yy1y3y(∞)TpTSTt4)调节时间Tsry(∞)105%y(∞)95%y(∞)精选ppt课件202117稳定性衰减比n=4:1~10:1最佳准确性余差C小好最大偏差A小好快速性过渡时间Ts短好各品质指标之间既有联系、又有矛盾。例如,过分减小最大偏差,会使过渡时间变长。因此,应根据具体工艺情况分清主次,对生产过程有决定性意义的主要品质指标应优先予以保证。控制系统的单项品质指标小结精选ppt课件202118第二章线性系统数学模型的形式——微分方程、传递函数、结构图考察方式:填空题传递函数的定义考察方式:填空题典型环节的传递函数考察方式:填空题RC、RLC电路的传递函数考察方式:综合题结构图串联、并联、反馈的等效变换考察方式:综合题精选ppt课件202119192.1.1线性系统微分方程的建立方法的工作原理,找出各物理量之间的关系,确定系统和各元件的输入量和输出量。的工作原理,找出各物理量之间的关系,确定系统和各元件的输入量和输出量。照信号的传递顺序,根据各元件在工作过程中所遵循的物理或化学定律列出微分方程。照信号的传递顺序,根据各元件在工作过程中所遵循的物理或化学定律列出微分方程。程进行数学处理,忽略次要因素,简化原始方程。消去中间变量,得到输出量与输入程进行数学处理,忽略次要因素,简化原始方程。消去中间变量,得到输出量与输入分方程。分方程。惯例把与输入量有关各项写在方程右边惯例把与输入量有关各项写在方程右边,,把输出量有关各项写在方程左边把输出量有关各项写在方程左边,,方程两边方程两边按降幂排列。按降幂排列。1、用解析法建立系统微分方程的一般步骤:精选ppt课件202120202.1.1线性系统微分方程的建立方法量和输出量:输入量为容易给定的量,输出量为我们关注的量量和输出量:输入量为容易给定的量,输出量为我们关注的量律,均指以前课程介绍的知识:例如律,均指以前课程介绍的知识:例如《《电路基础电路基础》》、、《《电机拖动电机拖动》》、、《《分析力学分析力学》》等。等。程(常微分方程):程(常微分方程):补充)()(dd)(dd)(dd)()(dd)(dd)(dd1111011110txbtxtbtxtbtxtbtyatytatytatytammmmmmnnnnnn精选ppt课件20212121一指输入作用是t=0后才加于系统的,因此输入量及其各阶导数,在t=时的值为零。2.2传递函数线性定常系统在输入、输出初始条件均为零的条件下,输出的拉氏变换与输入的拉氏变换之比,称为该系统的传递函数。1、传递函数的定义0二指输入信号作用于系统之前系统是静止的,即t=时,系统的输出量及各阶导数为零。0零初始条件精选ppt课件20212222传递函数的两种标准形式——多项式模型G(s)Ur(s)Uc(s))s(U)s(U)s(Grc)()()()()(11101110sNsMasasasabsbsbsbsRsCsGnnnnmmmmniimjjnmpszsKpspspszszszsK112121)()())....()(())...()((G(s)=精选ppt课件202123231.比例环节:输出量与输入量成正比,不失真也无时间滞后的环节称为比例环节。KsUsUsGic)()()(典型环节的传递函数)()(tKutuic2.积分环节:输出量正比于输入量的积分的环节称为积分环节。dttuTtutrc0)(1)(sTsUsUsGrc1)()()(精选ppt课件202124243.微分环节:输出信号与输入信号对时间的导数成正比。dttduTturc)()(sTsUsUsGrc)()()(典型环节的传递函数(续)4.惯性环节:)()()(tKutudttduTrcc1)()()(TsKsUsUsGrcT越大,延迟越大精选ppt课件20212525()1Gss5.一阶微分环节:由一个比例环节和一个理想微分环节构成。6.二阶振荡环节:121)(22TssTsG2222nnnss7.时滞环节:具有纯时间延迟传递关系的环节。又叫延迟环节。)()(tUtUrcsesG)(典型环节的传递函数(续)为时间常数精选ppt课件20212626传递函数与电气网络的运算阻抗络内的电阻、电容、电感等线性元件的复数阻抗,分别为R、1/Cs、Ls。遵的基本定律,直接列写电路输入量和输出量之间的关系,利用代数运算即可求网络的传递函数。精选ppt课件202127例题:11/1/1)()s()(RCsCsRCssRCsi(t)+r(t)c(t)+£¨a£©µç·ͼRCR与1/Cs并联,根据并联分压公式得,精选ppt课件202128282.3结构图变量之间的运算关系,是控制理论中描述复杂系统的一种简便方法。它也是一种数学模型,是一种将控制系统图形化了的数学模型,在控制理论中应用广泛。精选ppt课件20212929)()()()()()()()(2121sGsGsRsCsRsGsGsCG1(s)G2(s)R(s)C(s)U(s)G1(s)•G2(s)R(s)C(s)两个串联的方框可以合并为一个方框,合并后方框的传递函数等于两个方框传递函数的乘积。精选ppt课件20213030C1(s)G1(s)G2(s)R(s)C(s)C2(s))()()()()()]()([)(2121sGsGsRsCsRsGsGsCG1(s)G2(s)R(s)C(s)两个并联的方框可以合并为一个方框,合并后方框的传递函数等于两个方框传递函数的代数和。并联结构的等效变换精选ppt课件20213131反馈结构的等效变换)()()(1)()()(),()()()()()()()()()(sRsHsGsGsCsBsEsBsRsEsHsCsBsEsGsC得消去中间变量G(s)R(s)C(s)H(s)B(s)E(s)R(s)C(s))()(1)(sGsHsG精选ppt课件202132第三章线性系统稳定性分析的三种方法——特征方程的特征根在s左半平面,劳斯判据、奈奎斯特判据考察方式:填空题特征方程考察方式:选择、综合题劳斯判据考察方式:综合题,难度同例3.9性能指标计算(超调量和调节时间)考察方式:综合题,难度同例3.8和3.10精选ppt课件202133表3.1典型输入信号精选ppt课件2021343.1.2动态性能指标3.1.2动态性能指标精选ppt课件2021353.3二阶系统的单位阶跃响应2222)()()(nnnsssRsCs二阶系统写成标准形式n-自然频率(或无阻尼振荡频率)-阻尼比(相对阻尼系数)图2.1无源电路RLC精选ppt课件2021363.3二阶系统的单位阶跃响应3.3.1二阶系统的数学模型2222)()()(nnnsssRsCs二阶系统写成标准形式二阶系统的特征方程为0222nnss特征根即闭环极点为122,1nns精选ppt课件2021373.3.2二阶系统的单位阶跃响应二阶系统单位阶跃响应的数学推导过程见教材P54式(3-6)、(3-7)。MATLAB软件可以直接得到二阶系统单位阶跃响应曲线。—过阻尼系统—响应同上但更缓慢—临界阻尼—,响应无超调单调上升—欠阻尼系统—响应为衰减振荡—无阻尼系统—,响应为等幅振荡—不稳定系统—系统响应是发散的,11,100,0精选ppt课件2021383.3.3二阶系统阶跃响应的性能指标ndt22.06.01在较大的ξ范围内,近似有ndt7.01,亦可用当10与ξ成正比,与ωn成反比。精选ppt课件2021392.上升时间trdrt3.3.3二阶系统阶跃响应的性能指标121arccos12arctg21nd响应速度变快。(减小),(增大)一定时,一定,即rtn精选ppt课件202140pt距离越远)(闭环极点离负实轴的一定时,n3.3.3二阶系统阶跃响应的性能指标3.峰值时间tp2121221ndddpTt精选ppt课件2021414.超调量超调量在峰值时间发生tan1%100%100)()()(%2eehhthp图3-11阻尼比与超调量之间的关系%只与阻尼比ξ相关,并且一一对应成反比关系。%3.3.3二阶系统阶跃响应的性能指标精选ppt课件2021425.调节时间ts的计算△表示实际响应与稳态输出之间的误差,则一般用近似公式计算ts,当ξ≤0.8时,选取误差带)02.0(4)05.0(3nSnStt3.3.3二阶系统阶跃响应的性能指标精选ppt课件202143psdsdstttT2/2t6.振荡次数振荡次数是指在调节时间ts内,C(t)波动的次数。根据这一定义可得振荡次数为3.3.3二阶系统阶跃响应的性能指标系统的系能指标可以通过计算得到,因此,也可以根据性能要求,设计系统参数。精选ppt课件202144二阶系统的校正——PD控制1)(sR)(sCsTd)2(2nnss¡ª)(sE图3.14PD控制系统在改善二阶系统性能方法中,比例-微分(PD)控制和测速反馈控制是常用的方法。精选ppt课件2021453.5自动控制系统的代数稳定判据重缺点是它们容易产生振荡,因此,判别系统的稳定性和使系统处于稳定的工作状态是自动控制的基本问题之一。线性系统稳定的充要条件是闭环系统的极点(特征方程的根)全部位于s左半平面。精选ppt课件2021463.5.3劳斯判据据是基于系统特征方程式的根与系数的关系而建立的。不分解多项式因式的,就能够确定出位于:右半平面内闭环极点数目;原方程首项系数a0为负,可先将方程两端同乘以-1)。01110nnnnasasasa精选ppt课件202147特征方程:10112124321343212753116420gsfseesccccsbbbbsaaaasaaaasnnnn01110nnnnasasasa3120111aaaaab5140121aaaaab7160131aaaaab2131111bbaabc3151121bbaabc4171131bbaabc劳斯表精选ppt课件202148左半平面的充分必要条件是劳斯表的第1列系数全部是正数。3.5.3劳斯判据对于一阶和二阶系统,特征方程的所有系数同号是系统稳定的充分必要条件。精选ppt课件2021493.6稳态误差稳态条件下输出量的期望值与稳态值之间存在的误差,称为系统稳态误差静差)。稳态误差的分析(3-30)由图3.22得(3-31)由图3.22可得误差传递函数(3-32)由终值定理,求得稳态误差(3-)()()()(sCsHsRsE)()(11)()()(sGsHsRsEsdefe)()(1)()()()(sGsHsRsRssEe)()(1)(lim)(lim)(00sGsHssRssEeessssss精选ppt课件2021503.6.3扰动作用下的稳态误差)(sR)(sG)(sE)(1sG)(sG)(2sG)(sH)(sC)(sN-N(s)C(s)H(s))(2sG)(1sG)()()(1)()()()(212sHsGsGsGsNsCsMN)()()()(1)()()()(212sNsHsGsGsGsNsMsCNn)()()()(1)()(0)(212sNsHsGsGsGsCsEnn对于系统的扰动响应,理想输出为零,故稳态误差为:)()()()(1)()(lim2120sNsHsGsGssGssEensssn期望值与稳态值之差精选ppt课件202151【例3.9】已知一单位反馈控制系统如图问:(1)Gc(s)=1时,闭环系统是否稳定?ssKsGPc)1()((2),闭环系统稳定的条件?)(sR)(sCsKt)(10)5(20sss¡ª)(sGc0205015020)10)(5(23SSSSSS解:(1)闭环特征方程:列劳斯表20152075020155010123SSSS第一列均为正值,S全部位于左半平面,故系统稳定。精选ppt课件202152闭环特征方程为)10))(5(20)1()(sssssKsGP0)1(20)10)(5(2SKSSSp020205015234ppKSKSSSpppppppppKSKKKKSKKSKSKS20)20750(1512015201520750201520750020152050101234列劳斯表欲使系统稳定第一列的系数必须全为正值由此得出系统稳定的条件为0
提供自动控制原理知识点归纳PPT课件会员下载,编号:1701026765,格式为 xlsx,文件大小为109页,请使用软件:wps,office Excel 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载