自动控制原理课件2.1(梅晓榕)
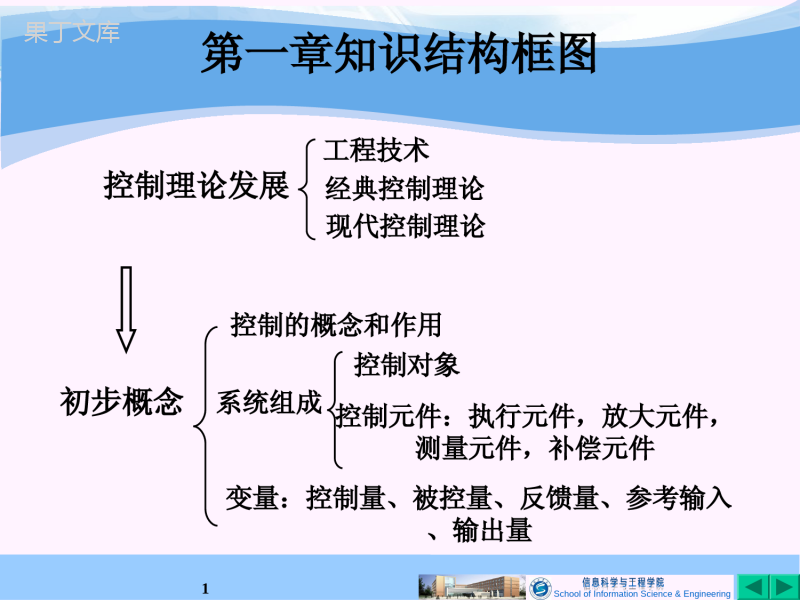
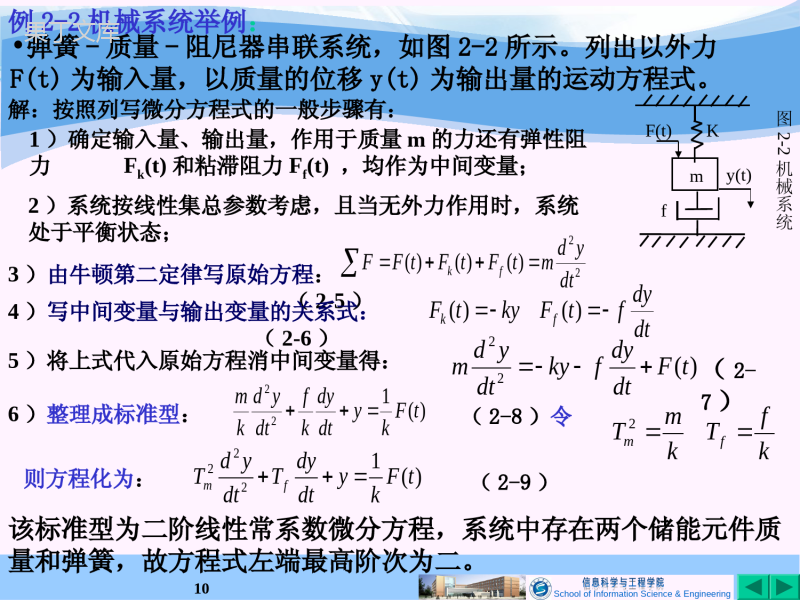
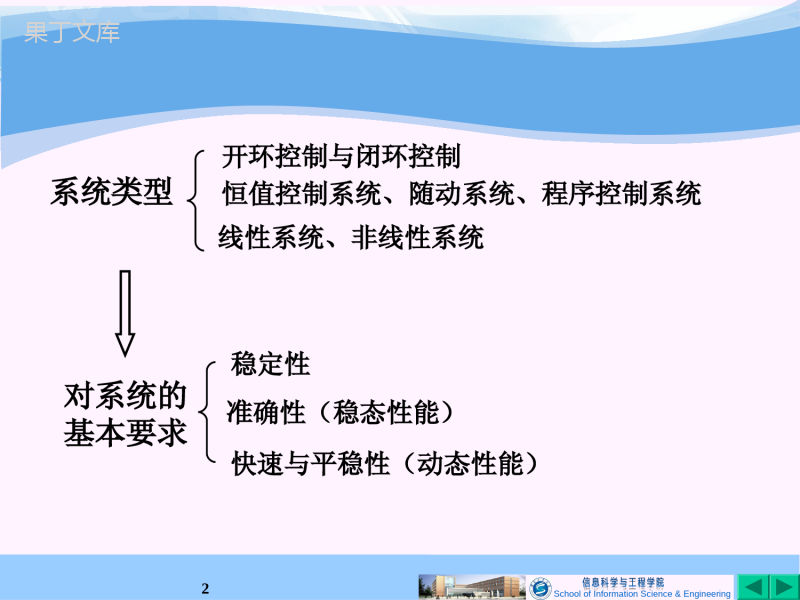
SchoolofInformationScience&Engineering1第一章知识结构框图初步概念系统组成变量:控制量、被控量、反馈量、参考输入、输出量控制的概念和作用控制对象控制元件:执行元件,放大元件,测量元件,补偿元件控制理论发展现代控制理论工程技术经典控制理论SchoolofInformationScience&Engineering2对系统的基本要求快速与平稳性(动态性能)稳定性准确性(稳态性能)系统类型线性系统、非线性系统开环控制与闭环控制恒值控制系统、随动系统、程序控制系统SchoolofInformationScience&Engineering3实验安排第四周时间待定时间待定第六周时间待定时间待定第七周时间待定时间待定第八周时间待定时间待定SchoolofInformationScience&Engineering4第二章控制系统的数学模型2.1数学模型的特点及类型2.2控制系统的时域数学模型——微分方程2.5控制系统的结构图及其化简2.4典型环节传递函数2.3控制系统的复域数学模型——传递函数2.6信号流图及梅逊公式2.7小结SchoolofInformationScience&Engineering52.1数学模型的特点及类型•系统是指相互联系又相互作用着的对象之间的有机组合.静态系统或稳态系统:系统当前输出仅由当前的输入所决定.•数学模型:描述系统动态特性及各变量之间关系的数学表达式。动态系统:系统当前输出不仅由当前输入所决定,而且还受到过去输入的影响。SchoolofInformationScience&Engineering62.1.1数学模型的特点1)相似性:数学模型可能相同,即具有相同的运动规律。2)简化性和准确性常在误差允许的条件下忽略一些对特性影响较小的物理因素,用简化的数学模型来表达实际系统。3)动态模型:描述变量各阶导数之间关系的微分方程。4)静态模型:在静态条件下(即变量的各阶导数为零),描述变量之间的代数方程。SchoolofInformationScience&Engineering72.1.2数学模型的类型3)用比较直观的方块图模型进行描述。2)状态变量描述或内部描述。它特别适用于多输入、多输出系统,也适用时变系统、非线性系统和随机控制系统1)输入-输出描述或外部描述。如微分方程、传递函数和差分方程.2.2控制系统的时域数学模型——微分方程2.2.1列写微分方程式的一般步骤1.分析系统运动的因果关系,确定系统的输入量、输出量及内部中间变量,搞清各变量之间的关系。2.作出合乎实际的假设,以便忽略一些次要因素,使问题简化。SchoolofInformationScience&Engineering83.根据支配系统动态特性的基本定律,列出各部分的原始方程式。牛顿定律、能量守恒定律、克希霍夫定律、物质守恒定律以及由它们导出的各专业应用公式。4.列写各中间变量与其它变量的因果式,称为辅助方程式。至此,方程的数目应与所设的变量(除输入外)数目相等。与输入量有关的各项放在方程式的右边,与输出量有关的各项放在左边,各导数项按降阶排列,各项系数化成有物理意义的形式5.连立上述方程,消去中间变量,最终得到只包含系统输入量与输出量的方程式。6.将方程式化成标准型。一般从系统的输入端开始,依次列写系统各组成部分的运动方程式,兼顾相邻元件的负载效应问题。SchoolofInformationScience&Engineering9例2-1电路系统举例:•电阻-电感-电容串联系统,如图2-1所示。列出以ur(t)为输入量,uc(t)为输出量的网络微分方程式。•解:按照列写微分方程式的一般步骤有:1)确定输入量、输出量、中间变量i(t);2)网络按线性集总参数考虑,且忽略输出端负载效应;3)由克希霍夫定律写原始方程:(2-1)4)列写中间变量与输出变量的关系式:(2-2)5)将上式代入原始方程消中间变量得:6)整理成标准型:令T1=L/R,T2=RC,则方程化为:rcuuRidtdiLdtduCicrcccuudtduRCdtudLC22(2-3)rcccuudtduTdtudTT22221(2-4)T1、T2的量纲:[T1]=[L/R]=秒[T2]=[RC]=秒则T1、T2是电路网络两个时间常数,ucurCLRi图2-1RLC电路系统SchoolofInformationScience&Engineering10例2-2机械系统举例:•弹簧-质量-阻尼器串联系统,如图2-2所示。列出以外力F(t)为输入量,以质量的位移y(t)为输出量的运动方程式。2)系统按线性集总参数考虑,且当无外力作用时,系统处于平衡状态;3)由牛顿第二定律写原始方程:(2-5)4)写中间变量与输出变量的关系式:(2-6)5)将上式代入原始方程消中间变量得:6)整理成标准型:该标准型为二阶线性常系数微分方程,系统中存在两个储能元件质量和弹簧,故方程式左端最高阶次为二。解:按照列写微分方程式的一般步骤有:1)确定输入量、输出量,作用于质量m的力还有弹性阻力Fk(t)和粘滞阻力Ff(t),均作为中间变量;mfKy(t)F(t)图2-2机械系统22)()()(dtydmtFtFtFFfkdtdyftFkytFfk)()((2-7)(2-8)令)(22tFdtdyfkydtydm)(122tFkydtdykfdtydkmkfTkmTfm2)(1222tFkydtdyTdtydTfm(2-9)则方程化为:SchoolofInformationScience&Engineering11方程系数的物理意义:可见Tm、Tf具有时间的量纲,故称为系统的时间常数。时间常数可决定方程的解随时间变化的快慢。另外,从静态方程的描述可知,(2-10)故,1/k又称为系统静态放大倍数。)(1)(tfkty牛顿米米牛顿秒米牛顿秒)(米牛顿秒米)秒米(千克千克米牛顿千克/11//////][222kkfTkmTfm1/k的量纲是输出与输入的量纲比。则1/k的量纲代表了两种物理量的转换关系。SchoolofInformationScience&Engineering12弹簧阻尼系统机械系统电系统力F质量m黏性摩擦系数f弹簧系数k位移x速度v转矩T转动惯量J黏性摩擦系数f扭转系数k角位移角速度电压u电感L电阻R电容的倒数1/C电荷q电流I表2-1相似系统中的相似变量)(122tFkydtdykfdtydkmrcccuudtduRCdtudLC22SchoolofInformationScience&Engineering132.2.2实际物理系统线性微分方程的一般特征•线性定常方程形式:rbrbrbcacacammmnnn)1(1)(0)1(1)(0r(t)输入量c(t)输出量•从工程可实现的角度来说,该方程满足以下的要求:•1.方程的系数为实常数,由物理系统自身参数决定。•2.输出的阶次都高于或等于输入的阶次。•3.方程两端各项的量纲都是一致的。•定义:任何系统,只要它们的微分方程具有相同的形式,就是相似系统,而在微分方程中占据相同位置的物理量,叫做相似量。SchoolofInformationScience&Engineering14线性系统————满足叠加原理物理系统r(t)c(t)激励响应(2)齐次性:保持比例因子ar(t)ac(t)非线性系统(1)叠加性:线性系统内各个激励产生的响应互不影响r1(t)+r2(t)c1(t)+c2(t)r1(t)c1(t)r2(t)c2(t)2.3控制系统的复域数学模型——传递函数•传递函数:在线性定常系统中,当初始条件为零时,输出量的拉普拉斯变换与输入量的拉普拉斯变换之比.2.3.1传递函数的定义SchoolofInformationScience&Engineering15设单输入单输出线性定常系统:r(t)输入量c(t)输出量在零初始条件下:0)0()0()0()1(nccc0)0()0()0()1(mrrr)(][)(][11101110sRbsbsbsbsCasasasammmmnnnnnnnnmmmmasasasabsbsbsbsRsCsG11101110)()()(拉氏变换:传递函数:n个m个n≥mG(s)r(s)c(s)方框图C(s)=G(s)·R(s)rbrbrbcacacammmnnn)1(1)(0)1(1)(0SchoolofInformationScience&Engineering162.3.2传递函数的实际意义1)现实的控制系统多是零初始条件。2)在输入没加入之前,认为输入恒等于零。3)对于非零初始条件所产生的影响,可用叠加原理来进行处理。2.3.3传递函数的性质1)传递函数是一种数学模型,与系统的微分方程相对应。2)是系统本身的一种属性,与输入量的大小和性质无关。3)只适用于线性定常系统.4)传递函数是单变量系统描述,外部描述。5)传递函数是在零初始条件下定义的,不能反映在非零初始条件下系统的运动情况。6)一般为复变量S的有理分式,即nm。且所有的系数均为实数。SchoolofInformationScience&Engineering17•7)如果传递函数已知,则可针对各种不同形式的输入量研究系统的输出或响应。•8)如果传递函数未知,则可通过引入已知输入量并研究系统输出量的实验方法,确定系统的传递函数。•9)传递函数与脉冲响应函数一一对应.脉冲响应函数是指系统在单位脉冲输入量作用下的输出。当单位脉冲输入系统时,R(s)=L[(t)]=1因此系统的输出为C(s)=G(s)C(s)=G(S)•反变换得脉冲响应:L-1[G(s)]=g(t)(2-12)1)()(000)(tdtttt(2-11)G(s)0tr(t)(t)(t)g(t)g(t)0tc(t)图2-3系统的脉冲响SchoolofInformationScience&Engineering182.3.4传递函数的微观结构•线性定常系统的传递函数都是复变量S的有理分式,其分子多项式和分母多项式经分解后可写成各种形式。•(1)零极点表达式)())(()())(()(212111101110nmgnnnnmmmpspspszszszsKasasasabsbsbsbsG-m(2-13)•式中,z1,z2,…,zm是分子多项式等于零时的根,同时使G(s)=0,故称为传递函数的零点;•p1,p2…,pn是分母多项式等于零时的根,同时使G(s)=∞,故称为传递函数的极点(又称特征根);•D(s)=0为特征方程•kg=b0/a0,称为传递系数或根轨迹增益。传递函数与它的零点、极点和传递系数一一对应。0)())(()(21npspspssDSchoolofInformationScience&Engineering19传递函数的零点和极点同时表示在复数平面上的图形,叫做传递函数的零极点分布图。例如:)22)(3(2)(2sssssGj0-11xx-1-2-3x图2-4零极点分布图图中零点用“o”表示,极点用“×”表示。传递函数的这种形式及零极点分布图在根轨迹法中使用较多。SchoolofInformationScience&Engineering20•(2)时间常数表达式)1()12)(1()1()12)(1()(222212222111101-m110sTsTsTsTssssKasasasabsbsbsbsGjinnnnmmmKabsGnms0)((2-14)(2-15)由拉氏变换的终值定理,当S→0时,描述时域中t→∞时的性能,此时系统的传递函数就转化为静态放大倍数即•式中,i、Tj称为时间常数;K称为传递系数或静态增益。传递函数的时间常数表示形式很容易将系统分解成一些典型环节。
提供自动控制原理课件2.1(梅晓榕)会员下载,编号:1701026778,格式为 xlsx,文件大小为20页,请使用软件:wps,office Excel 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载