哈工大自动控制原理PPT课件,哈工大理论力学ppt课件


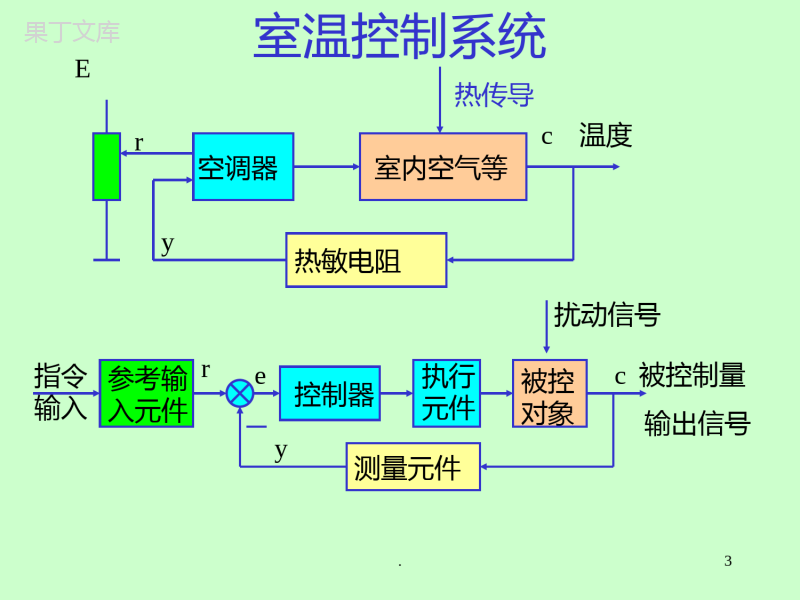
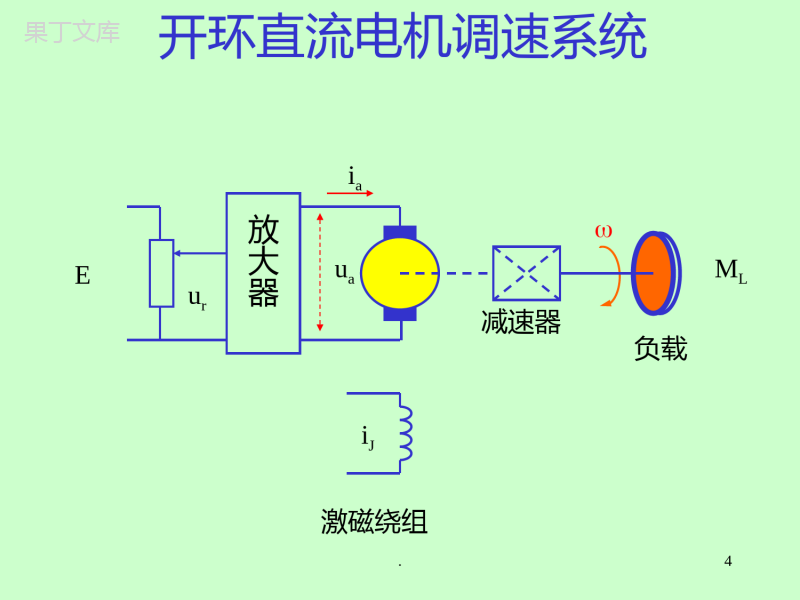
.1自动控制原理授课班级:10305201,02,03,04,05授课时间:2006年春季学期讲课学时:50学时授课教师:哈尔滨工业大学航天学院控制科学与工程系王彤.2第一章自动控制概述自动控制:在没有人直接操作的情况下,通过控制器使被控对象或过程自动地按要求的规律运行。.3室温控制系统c温度热敏电阻Ery空调器室内空气等热传导参考输入元件控制器执行元件被控对象测量元件指令输入扰动信号c被控制量输出信号rey.4开环直流电机调速系统iaEMLi(t)放大器iJuaur激磁绕组减速器负载.5闭环直流电机调速系统iaEMLi(t)放大器iJuaur激磁绕组减速器负载测速发电机激磁+_uufucf++_+__.6开环控制与闭环控制执行元件参考输入控制变量被控制量扰动量被控对象控制器执行元件参考输入控制变量被控制量扰动量被控对象控制器测量元件偏差开环控制没有测量元件,没有反馈。闭环控制测量元件测量被控制量,反馈到输入端与参考输入相比较,产生偏差信号。对偏差信号放大变换,使被控制量向减少偏差的方向变化(减小或消除偏差)。.7控制系统的基本组成放大与串联补偿功放执行元件被控对象反馈补偿测量元件参考输入偏差反馈量被控制量扰动量.8元件的作用1.执行元件直接操纵被控对象,改变被控制量。如电动机,液压马达,温控系统中的加热器等。选择执行元件要注意有足够的功率和频带宽度。2.放大元件对信号进行幅值和功率的放大,以及信号形式的变换。3.测量元件测量被控制量,产生与被控制量有一定函数关系的信号。测量元件的精度要高于系统精度,也要有足够的带宽。4.比较元件实现参考输入与反馈量的比较,产生偏差信号。5.被控对象控制系统所要控制的对象,其输出为系统地被控制量。6.补偿元件(校正元件)用于改善系统的动态和稳态性能。.9控制系统的分类伺服系统(随动系统):输入信号是变化规律未知的任意时间函数,系统的任务是使被控制量按同样规律变化并与输入信号的误差保持在规定的范围内。常见的有:火炮方位、俯仰控制系统;导弹发射架控制系统;雷达天线控制系统;仿型铣床;记录仪表随动系统;机器人运动控制系统;硬盘磁头位置控制系统。定值控制系统(镇定系统):参考输入信号是常值或较少变化,要求系统抑制干扰,使被控制量保持不变。常见的如:稳压电源;恒温系统;湿度控制系统;电机调速系统;陀螺稳定平台。.10随动系统实例1.11随动系统实例2.12随动系统实例3.13随动系统实例4.14随动系统实例5.15随动系统实例6.16随动系统实例7.17定值控制系统实例1.18定值控制系统实例2.19定值控制系统实例3.20陀螺仪装入运载火箭.21国际空间站更换陀螺仪.22哈尔滨号导弹驱逐舰.23对控制系统的基本要求1.稳定性稳定是系统工作的必要条件。什么是不稳定?被控制量不是趋于所希望的数值,而是振荡发散或单调发散。稳定的系统,在初始条件作用下的响应收敛。2.准确性稳态时(过渡过程结束后),系统的希望输出与实际输出之间的差别较小。3.快速性与平稳性系统响应速度快,过渡过程时间短,超调量小,振荡次数少。.24欢迎0352的同学学习自动控制原理
提供哈工大自动控制原理PPT课件,哈工大理论力学ppt课件会员下载,编号:1701026737,格式为 xlsx,文件大小为24页,请使用软件:wps,office Excel 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载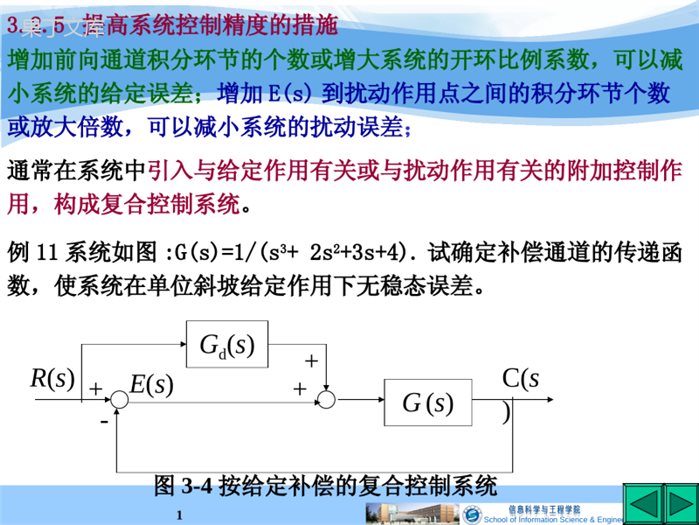 下载
下载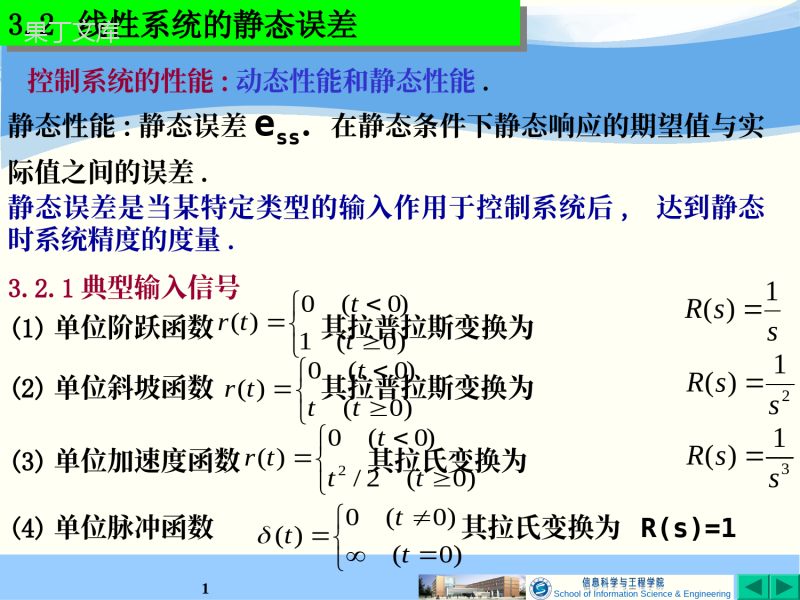 下载
下载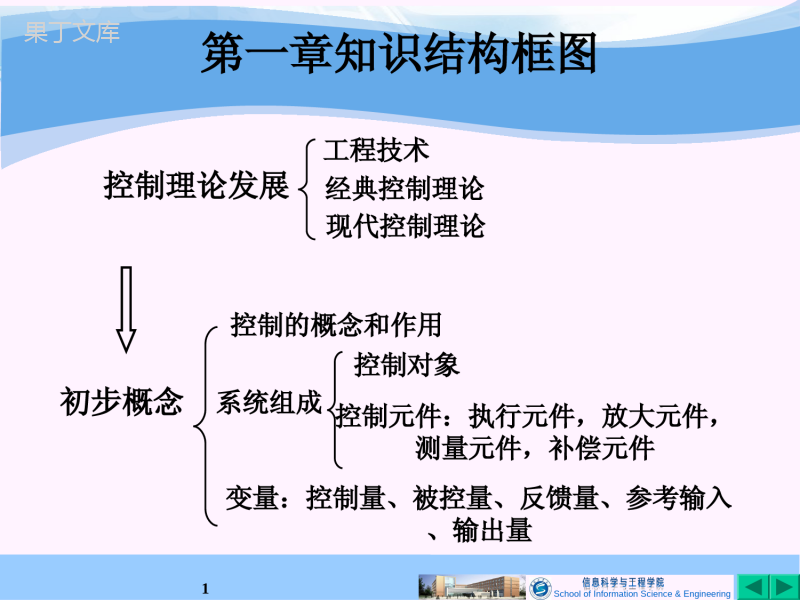 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载