实验七-UART串口通信,uart串口通信原理
本作品内容为实验七-UART串口通信,格式为 doc ,大小 338989 KB ,页数为 11页
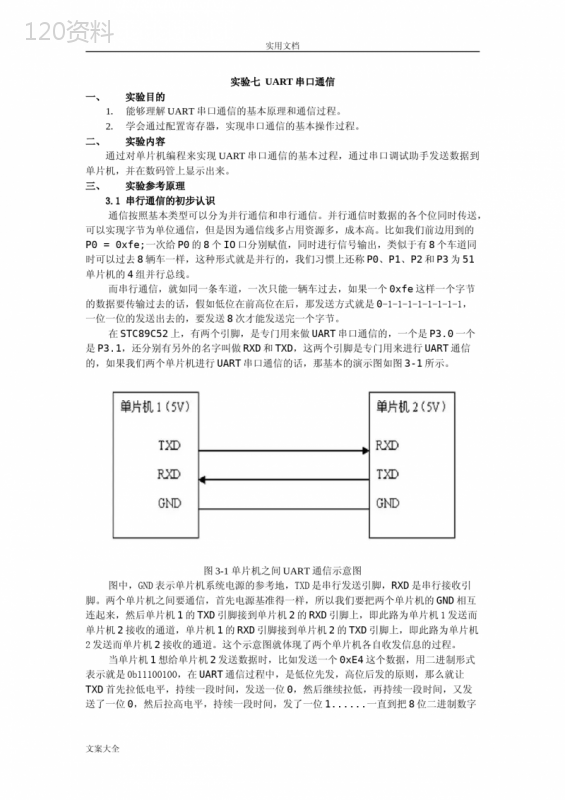
('实用文档实验七UART串口通信一、实验目的1.能够理解UART串口通信的基本原理和通信过程。2.学会通过配置寄存器,实现串口通信的基本操作过程。二、实验内容通过对单片机编程来实现UART串口通信的基本过程,通过串口调试助手发送数据到单片机,并在数码管上显示出来。三、实验参考原理3.1串行通信的初步认识通信按照基本类型可以分为并行通信和串行通信。并行通信时数据的各个位同时传送,可以实现字节为单位通信,但是因为通信线多占用资源多,成本高。比如我们前边用到的P0=0xfe;一次给P0的8个IO口分别赋值,同时进行信号输出,类似于有8个车道同时可以过去8辆车一样,这种形式就是并行的,我们习惯上还称P0、P1、P2和P3为51单片机的4组并行总线。而串行通信,就如同一条车道,一次只能一辆车过去,如果一个0xfe这样一个字节的数据要传输过去的话,假如低位在前高位在后,那发送方式就是0-1-1-1-1-1-1-1-1,一位一位的发送出去的,要发送8次才能发送完一个字节。在STC89C52上,有两个引脚,是专门用来做UART串口通信的,一个是P3.0一个是P3.1,还分别有另外的名字叫做RXD和TXD,这两个引脚是专门用来进行UART通信的,如果我们两个单片机进行UART串口通信的话,那基本的演示图如图3-1所示。图3-1单片机之间UART通信示意图图中,GND表示单片机系统电源的参考地,TXD是串行发送引脚,RXD是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的GND相互连起来,然后单片机1的TXD引脚接到单片机2的RXD引脚上,即此路为单片机1发送而单片机2接收的通道,单片机1的RXD引脚接到单片机2的TXD引脚上,即此路为单片机2发送而单片机2接收的通道。这个示意图就体现了两个单片机各自收发信息的过程。当单片机1想给单片机2发送数据时,比如发送一个0xE4这个数据,用二进制形式表示就是0b11100100,在UART通信过程中,是低位先发,高位后发的原则,那么就让TXD首先拉低电平,持续一段时间,发送一位0,然后继续拉低,再持续一段时间,又发送了一位0,然后拉高电平,持续一段时间,发了一位1......一直到把8位二进制数字文案大全实用文档0b11100100全部发送完毕。这里就牵扯到了一个问题,就是持续的这“一段时间”到底是多久?从这里引入我们通信中的另外重要概念——波特率,也叫做比特率。波特率就是发送一位二进制数据的速率,习惯上用baud表示,即我们发送一位数据的持续时间=1/baud。在通信之前,单片机1和单片机2首先都要明确的约定好他们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?不管是提前接收还是延迟接收,数据都会接收错误。在UART串行通信的时候,一个字节是8位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位0表示起始位,然后发送8位数据位,数据位是先低后高的顺序,数据位发完后再发一位1表示停止位。这样本来要发送一个字节8位数据,而实际上我们一共发送了10位,多出来的两位其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到来了一位低电平,那就知道了要开始准备接收数据了,接收到8位数据位后,然后检测到停止位,再准备下一个数据的接收了。我们图示看一下,如图3-2所示。图3-2串口数据发送示意图图3-2串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒。3.2串行RS232通信接口(了解)在台式电脑上,有一个9针的串行接口,这个串行接口叫做RS232接口,它和UART通信有关联,但是由于现在笔记本电脑都不带这种9针串口了,所以和单片机通信越来越趋向于使用USB虚拟的串口和单片机通信,因此这一节的内容作为了解内容。先来认识一下这个标准串口,串口分为9针的和9孔的,习惯上也称之为公头和母头,如图3-3所示。图3-3RS232通信接口RS232接口一共有9个引脚,分别定义是:1、载波检测(DCD);2、接收数据(RXD);3、发送数据(TXD);4、数据终端准备好(DTR);5、信号地线(SG);6、数据准备好文案大全实用文档(DSR);7、请求发送(RTS);8、清除发送(CTS);9、振铃提示(RI)。232串口和单片机进行通信,只需要关心其中的2脚(RXD),3脚(TXD)和5脚(GND)。虽然这三个脚的名字和我们单片机上的串口名字一样,但是却不能直接和单片机对连直接通信,这是因为,不是所有的电路都是5V代表高电平而0V代表低电平的。对于RS232标准来说,它是个反逻辑,也叫做负逻辑。为何叫负逻辑?它的TXD和RXD的电压,-3V到-15V代表是1,3-15V之间的电压代表是0。低电平代表的是1,而高电平代表的是0,所以称之为负逻辑。因此电脑的9针232串口是不能和单片机直接连接的,需要用一个转换芯片MAX232来完成,如图3-4所示。图3-4MAX232转接图这个芯片就可以实现把标准RS232串口电平转换成单片机能够识别和承受的UART0V/5V电平标准。也就是说其实RS232串口和UART串口,他们的协议类型是一样,只是电平不同而已,而MAX232这个芯片起到的就是中间人的作用,他把UART电平转换成RS232电平,也把RS232电平转换成UART电平,从而实现标准RS232接口和单片机UART之间的通信连接。3.3USB转串口通信(掌握)随着技术的发展,工业上还有RS232串口通信的大量使用,但是商业技术的应用上,已经慢慢的使用USB转UART技术取代了RS232串口,绝大多数笔记本电脑已经没有串口这个东西了,那我们要实现单片机和电脑之间的通信该如何办呢?我们只需要在我们电路上添加一个USB转串口芯片,就可以成功实现USB通信协议和标准UART串行通信协议的转换,在我们的开发板上,我们使用的是CH340T这个芯片,如图3-5所示。文案大全实用文档图3-5USB转串口电路左侧J2是一组跳线的组合,大家可以在我们板子左下角的跳线位置找到,我们是把3脚和5脚、4脚和6脚通过跳线帽短接到一起。右侧的CH340T这个电路很简单,把电源电路,晶振电路接好后,6脚和7脚的DP和DM分别接USB口的2个数据引脚上去,3脚和4脚通过跳线接到了我们单片机的TXD和RXD上去。3.5UART串口通信的基本应用3.5.1通信的三种基本类型通信通常可以分为单工、半双工、全双工通信。单工就是指只允许一方向另外一方传送信息,而另一方不能回传信息。比如我们的电视遥控器,我们的收音机广播等,都是单工通信技术。半双工是指数据可以在双方之间相互传播,但是同一时刻只能其中一方发给另外一方,比如我们的对讲机就是典型的半双工。全双工通信就发送数据的同时也能够接受数据,两者同步进行,就如同我们的电话一样,我们说话的同时也可以听到对方的声音。3.5.2UART模块介绍51单片机的UART串行口的结构由串行口控制寄存器SCON、发送和接收电路三部分构成,先来了解一下串口控制寄存器SCON。表3-1SCON--串行控制寄存器的位分配(地址:98H)可位寻址;复位值:0x00;复位源:任何复位位76543210符号SM0SM1SM2RENTB8RB8TIRI表3-2SCON--串行控制寄存器的位描述位符号描述7SM0这两位共同决定了串口通信的模式0到模式3共4种模式。我们最常用的就是模式1,也就是SM0=0,SM1=1,下边我们重点就讲模式1,其他模式从略。6SM15SM2多机通信控制位(很少用),模式1直接清零。文案大全实用文档4REN使能串行接收。由软件置位使能接收,软件清零则禁止接收3TB8模式2和3中将要发送的第9位数据(很少用)2RB8模式2和3中接收第9位数据(很少用),模式1用来接收停止位1TI发送中断标志位,模式1下,在数据位最后一位发送结束,开始发送停止位时由硬件自动置1,必须通过软件清零。也就是说,再发送前我们清零TI,发送数据,数据发送到停止位时,TI硬件置1,方便我们CPU查询发送完毕状态。0RI接收中断标志位,当接收电路接收到停止位的中间位置时,RI由硬件置1。也就是说,接收数据之前我们必须清零RI,接受数据到停止位的中间位置时,RI硬件置1,方便我们CPU查询到接收状态。对于串口的四种模式,模式1是最常用的,就是前边提到的1位起始位,8位数据位和1位结束位。在实际串口模块中,有一个专门的波特率发生器用来控制发送数据的速度和读取接收数据的速度。对于STC89C52RC单片机来讲,这个波特率发生器只能由定时器1或定时器2产生,而不能由定时器0产生,这是物理结构决定的。如果用定时器2,需要配置额外的寄存器,所以默认是使用定时器1作为波特率发生器,方式1下的波特率发生器必须使用定时器1的模式2,也就是自动重装载模式,定时器的初值具体的计算公式是:TH1=TL1=256-晶振值/12/2/16/波特率和波特率有关的还有一个寄存器,是一个电源管理寄存器PCON,他的最高位可以把波特率提高一倍,也就是如果写PCON=0x80以后,计算公式就成了TH1=TL1=256-晶振值/12/16/波特率数字的含义这里解释一下,256是8位数据的溢出值,也就是TL1的溢出值,11059200就是我们板子上单片机的晶振,12是说1个机器周期是12个时钟周期,值得关注的是这个16,串口模块采取的方式是把一位信号采集16次,其中第7、8、9次取出来,这三次中其中两次如果是高电平,那么就认定这一位数据是1,如果两次是低电平,那么就认定这一位是0,这样一旦受到意外干扰读错一次数据,也依然可以保证最终数据的正确性。串口通信的发送和接收电路,我们主要了解一下他们在物理上有2个名字相同的SBUF寄存器,他们的地址也都是99H,但是一个用来做发送缓冲,一个用来做接收缓冲。意思就是说,有2个房间,两个房间的门牌号是一样的,其中一个只出人不进人,另外一个只进人不出人,这样的话,我们就可以实现UART的全双工通信,相互之间不会产生干扰。但是在逻辑上呢,我们每次只操作SBUF,单片机会自动根据对它执行的是“读”还是“写”操作来选择是接收SBUF还是发送SBUF,后边通过程序,我们就会彻底了解这个问题。3.5.3UART串口程序一般情况下,编写串口通信程序的基本步骤如下所示:1、配置串口为模式1。2、配置定时器T1为模式2,即自动重装模式。3、确定波特率大小,计算定时器TH1和TL1的初值,如果有需要可以使用PCON进行波特率加倍。4、打开定时器控制寄存器TR1,让定时器跑起来。文案大全实用文档这个地方还要特别注意一下,就是在使用T1做波特率发生器的时候,千万不要再使能T1的中断了。串口中断,来看一下程序,结果如图3-6,例如发送0x12,返回0x13#include
提供实验七-UART串口通信,uart串口通信原理会员下载,编号:1700774489,格式为 docx,文件大小为11页,请使用软件:wps,office word 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载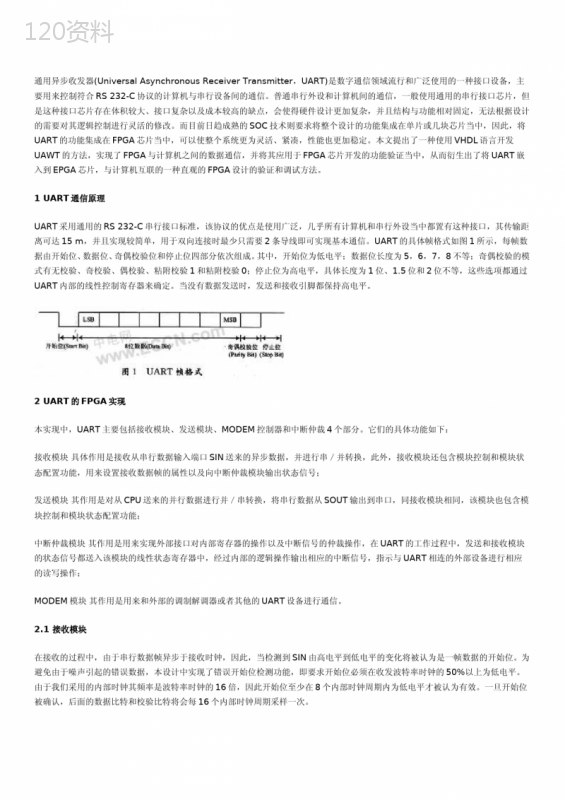 下载
下载 下载
下载 下载
下载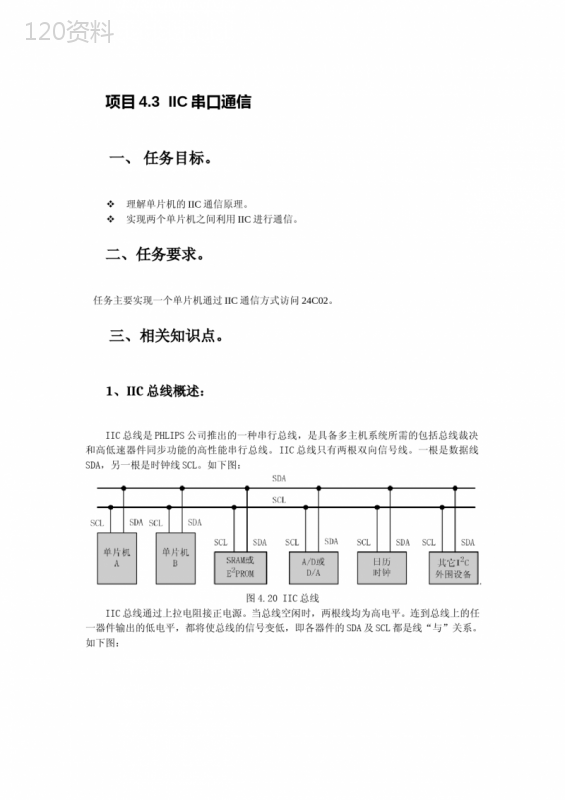 下载
下载 下载
下载 下载
下载