基于PROFINET协议的西门子S7-1200PLC与KUKA机器人通信实践
本作品内容为基于PROFINET协议的西门子S7-1200PLC与KUKA机器人通信实践,格式为 doc ,大小 306176 KB ,页数为 4页
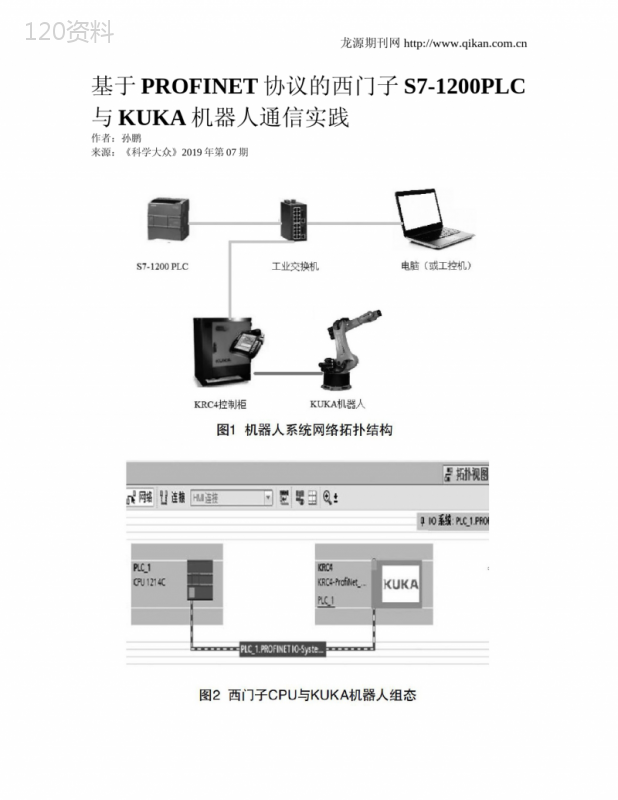
('龙源期刊网http://www.qikan.com.cn基于PROFINET协议的西门子S7-1200PLC与KUKA机器人通信实践作者:孙鹏来源:《科学大众》2019年第07期龙源期刊网http://www.qikan.com.cn摘;;要:机器人技术自20世纪60年代问世以来,取得了长足的发展。机器人4大家族中的KUKA机器人以其简单的操作和优秀的二次开发性能被国内越来越多的生产企业认可和使用,工业机器人成为工业自动化系统的3大支柱之一,它和自控系统控制器的通信已经变得越来越重要。文章探讨并实践了基于Profinet协议的KUKA机器人和西门子PLC之间的通信方式。关键词:Profinet协议;KUKA工业机器人;西门子S7-1200PLC目前工业机器人已得到了广泛的应用,最有代表性的是在汽车制造业中,其在焊接、喷漆、装配、搬运等工序中都大显身手,在金属加工制造业、电器制造业、塑料加工业等方面也应用广泛。随着现代科学技术的发展,机器人功能和性能不断提高,应用领域也进一步扩大[1]。KUKA公司于1898年在德国奥格斯堡成立,其产品广泛应用于汽车、冶金、食品和塑料成形等行业。2016年8月,我国美的集团完成了对KUKA机器人的收购。KUKA与日本YASKAWA,瑞士ABB,日本FANUC“”并称为工业机器人制造商的四大家族。伴随着信息化在制造业中的广泛应用以及中国制造2025战略的持续推进,工业机器人作为工业自动化3大支柱之一,发挥着越来越重要的作用。工业机器人与传统自动化设备的可编程逻辑控制器(ProgrammableLogicController,PLC)之间的通讯协作能力也尤为重要。KUKA工业机器人支持和西门子、罗克韦尔等多品牌的PLC产品进行外部通信,其通信方式主要采用现场总线的方式。目前,KUKA工业机器人可以支持Ethernet,PROFINET,PROFIBUS等现场总线通信方式,其中PROFINET是最为流行的现场总线之一。S7-1200PLC是西门子公司生产的紧凑型PLC,具有模块化结构和紧凑型设计。S7-1200PLC可扩展性强、灵活度高,可以支持小型运动控制系统、过程控制系统的高级应用功能。本文主要研究基于Profinet通信协议下,西门子S7-1200PLC与KUKA工业机器人之间通信的实践环境。1;;硬件环境搭建KUKA机器人KRC4控制柜主要作用是控制机器人机械臂的运动和状态,在与西门子PLC组网通信的过程中,KRC4控制柜作为从站,西门子的S7-1200PLC作为主站。整体KUKA机器人系统由KRC4控制柜、西门子PLC、交换机以及电脑(或工控机)组成,KRC4控制柜通过KLI接口连接到交换机上,采用的是RJ45插头的双绞线总线,西门子S7-1200PLC选用的CPU型号为1214C。机器人系统运行时,西门子PLC通过外部运行接口向机器人控制系统发布相关指令,包括:程序启动、系统运行、故障确认等。机器人控制系统则会通过网络将其自身的运动状态及故障信息等相关内容反馈给PLC。整个机器人系统的硬件组态和运行状态监控由电脑(或工控机)通过交换机完成[2]。KUKA机器人系统硬件设备的网络拓扑结构如图1所示。2;;软件环境配置将KUKA机器人控制柜、西门子S7-1200PLC以及电脑(或工控机)的IP地址设置成同一网段,一般情况下选择KUKA机器人默认的网段作为机器人系统的网段(192.168.0.xxx)。龙源期刊网http://www.qikan.com.cn打开西门子博图软件完成系统软件组态。第一步,在博图软件中新建项目,并添加S7-1200型PLC(CPU1214C),选择CPU版本;第二步,点击选项按钮,选择管理通用站描述文件(GSD)(D)在GSD文件存放路径中找到对应文件,选择安装导入KUKA机器人的GSD文件;第三步,在软件网络视图界面直接将KUKA机器人KRC4控制柜设备拖进界面进行组态,为CPU1214C添加Profinet子网,并设置IP地址192.168.0.1;第四步,将KUKA机器人硬件组件分配到PROFINET子网,点击KUKA网络接口,在属性栏设置其IP地址为192.168.0.2,PROFINETI/O设备名称设置为KRC4。如图2所示,然后编译下载硬件组态;第四步,在WorkVisual软件中对KUKA进行设置,选择文件按钮,选择KRC4项目,打开所需要的机器人项目;第五步,在项目结构的设备栏中,右键选中KRC4控制器将其激活,在控制“”器总线结构子目录里添加Profinet总线组件,DMT选择列表中选择Profinet;第六步,在项目结构中选择Profinet右键单击,添加ProfinetI/O设备;第七步,双击KRC4-PROFINET_3.2进行参数设置,KUKA总线IP地址为192.168.0.2设备名称为KRC4,确保与PLC组态的名称一致;第八步,对KRC4控制器将输入和输出的端口映射到ProfinetI/O地址,之后生成代码再下载到控制器中;第九步,在設备视图选项中对机器人端的信号进行确认,即为映射时的输入信号地址要与博图里对KUKA设备设置时的I/O地址对应。最后在博图软件中编写程序,通过Move指令完成KUKA机器人程序号的选择和程序号的选中监控。配置完成后,在PLC与KRC4控制柜信号交互开始时先进行外部自动初始化,确认系统基本信息。程序启动后KRC4控制柜会向PLC请求程序号,当其收到有效的程序号后,KRC4控制柜进入该程序号对应的程序控制机械臂开始执行动作。3;;结语(1)采用Profinet通信协议,可以实现西门子S7-1200PLC和KUKA机器人的控制数据稳定通信。(2)采用Profinet通信协议,信号稳定,通信速度快,抗外界干扰能力强,同时通信网络硬件连接简单,不需要额外配以通信模块,大大减少了实际应用中机器人掉线的问题。(3)优化了机器人网络通信结构,保证了生产设备的稳定运行,提高设备生产效率,有力促进了制造业自动化和信息化的融合,为智能制造提供基础数据支持。[参考文献][1]邵欣,谭盼龙,李云龙.工业机器人应用系统[M].北京:北京航空航天大学出版社,2017.[2]郭磊,王培光,宗晓萍.基于KUKA机器人的PROFINET协议通讯分析[J].电子世界,2017(7):12-13.[3]林燕文,李曙生.—工业机器人应用基础基于KUKA机器人[M].北京:北京航空航天大学出版社,2016.[4]兰虎,戴鸿滨,刘俊,等.工业机器人技术及应用[M].北京:机械工业出版社,2019.龙源期刊网http://www.qikan.com.cn',)
提供基于PROFINET协议的西门子S7-1200PLC与KUKA机器人通信实践会员下载,编号:1700668425,格式为 docx,文件大小为4页,请使用软件:wps,office word 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载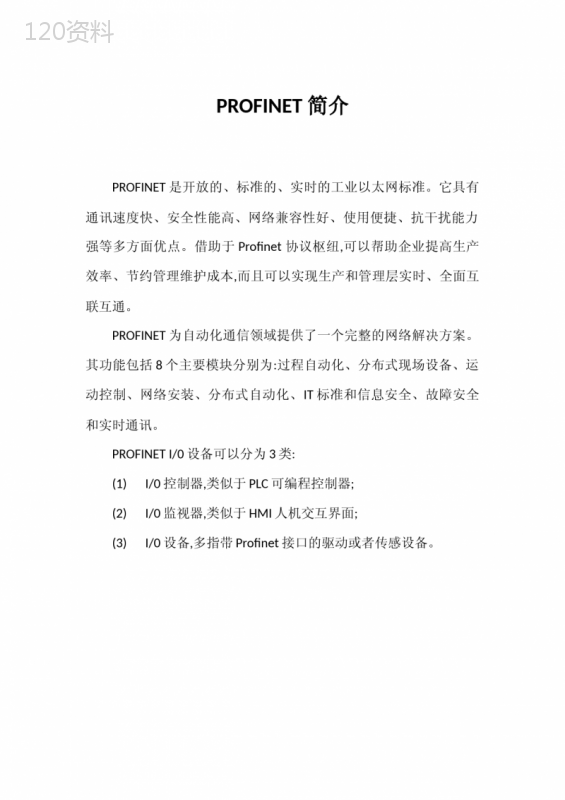 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载