KUKA机器人基础培训,kuka机器人基础培训教材

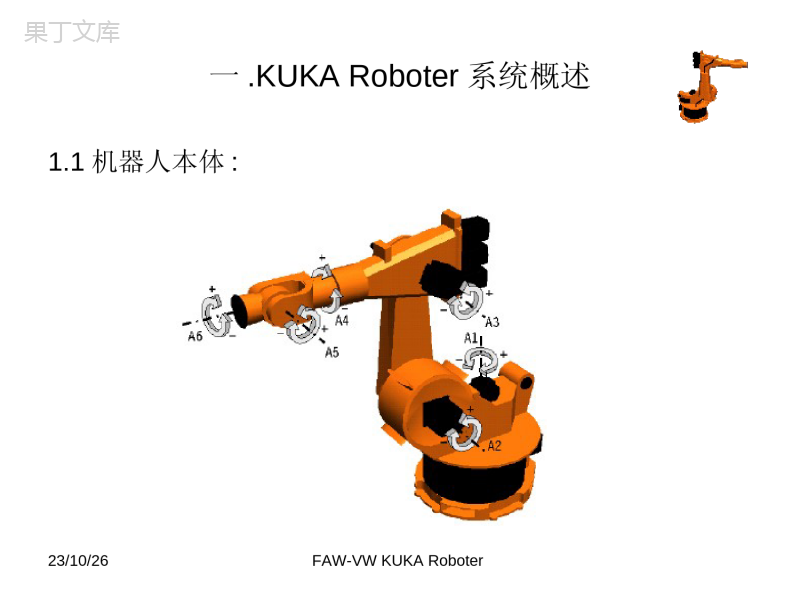
23/10/26FAW-VWKUKARoboterKUKA机器人基础KUKAproductsKUKAproducts23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述1.1机器人在现场的应用焊接点焊MIG焊TOX焊螺柱焊激光焊23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述1.1机器人本体:23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述1.2机器人驱动方案23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述1.2机器人驱动方案奔腾处理器:驱动模块:23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述1.2机器人驱动方案KUKA-VGA卡(显示卡):MFC卡(多功能卡):DSE卡(数字式伺服电子电路):DSEMFCVGA23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述1.2机器人驱动方案旋转变压器数字转换器(RDW):KUKA控制屏(KCP):它是人机对话的接口,作为输入接口的键盘,空间鼠标器,和以太网接口等。23/10/26FAW-VWKUKARoboter一.KUKARoboter系统概述本章小节:概念:应用,驱动方案(K-VGA,MFC,CPU,PM6-600,RDW,KCP,DSE)23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏23/10/26FAW-VWKUKARoboter状态键二.KUKARoboter用户编程2.1KUKA机器人操作屏23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏程序运行方式:单步或GO23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏状态条:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏状态条:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏状态条:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏状态条:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.1KUKA机器人操作屏坐标系:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程本章小结:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:用户用到的程序有FOLGE,UP,MAKRO程序等23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:主程序1:PTPVB=30%VE=0%ACC=100%Wzg=1SPSTrig=0[1/100s]FPFBONL=EIN1:F100=AUS2:bin10(EIN)=103:WARTEBISE49&E534:A49=AUS5:A53=A6:bin1(EIN)=35017:t1(EIN)=0[1/10Sek]23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:宏程序:MAKRO0.SRCSZ1ArbeitshubzuMakroAnfangA73=EINM18=EINWARTEBIS!E195&E193A194=AUSA197=EINA193=EINWARTEBISE195&!E193A193=AUS23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程2.2程序的建立:SPS编程23/10/26FAW-VWKUKARoboter二.KUKARoboter用户编程小结:编一套程序,PTPLIN并带有SPS指令?23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.1INTERBUS配置23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.1INTERBUS配置23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.1INTERBUS配置菜单的选择:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.1INTERBUS配置;[DRIVERS]INTERBUS=1,ibusInit,ibus.drv.o[INTERBUS]INW0=0INB2=2;;INDW3=896;;;;;OUTW0=0OUTB2=2;;OUTB3=896,x4[ENDSECTION]23/10/26FAW-VWKUKARoboter三KUKA机器人配置实际操作:正确的机器人INTERBUS配置?并验证输入输出正确?23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2INTERBUS配置组的输出:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2INTERBUS配置组的输出:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2INTERBUS配置组的输出:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2KUKA机器人零点校正:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2KUKA机器人零点校正:探针EMT机械零点位置23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2KUKA机器人零点校正:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.2KUKA机器人零点校正:注意事项23/10/26FAW-VWKUKARoboter实际操作:正确执行机器人零点校正?三KUKA机器人配置23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.3KUKA机器人坐标系统与轴相关的坐标系:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.3KUKA机器人坐标系统工具坐标系:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.3KUKA机器人坐标系统工具坐标系:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.3KUKA机器人坐标系统基坐标系统:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.3KUKA机器人坐标系统全局坐标系:23/10/26FAW-VWKUKARoboter三KUKA机器人配置练习:用不同的坐标系操作机器人,找出其不同点XYZabc?23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立前提:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立XYZ-4点:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立执行方法:将待检测的工具安装在法兰上,找出一个合适的参考点它可以是固定在工作空间的某一参考芯。23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立执行方法:工具正确23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立执行方法:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立ABC-2点:执行方法:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立ABC-2点:执行方法:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立ABC-2点:执行方法:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立ABC-2点:执行方法:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立ABC-2点:执行方法:23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.4KUKA机器人工具坐标系的建立ABC-2点:存储工具数据,此时工具坐标建立完成。23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置3.5KUKA机器人外部工具坐标系的建立23/10/26FAW-VWKUKARoboter三KUKA机器人配置本章小结:INTERBUS零点校正坐标系工具坐标23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:输入输出端23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:输入输出端23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:实际位置23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:M位:F位:I:t:23/10/26FAW-VWKUKARoboter四.KUKA机器人基础菜单4.1KUKA机器人显示:登录册23/10/26FAW-VWKUKARoboter五.KUKARoboter文件管理5.1文件0.新建1.打印2.存档3.还原4.改名5.软盘格式化6.属性23/10/26FAW-VWKUKARoboter五.KUKARoboter文件管理5.1文件文件-还原-0磁盘.-1.网络.-2.登录册.-3.CROSS登录册复制到软盘.23/10/26FAW-VWKUKARoboter五.KUKARoboter文件管理5.1文件程序还原文件-还原-0磁盘-0当前选择-1全部-2应用程序-0序列-1UP-2宏-3VW-USER-3系统数据-0机器人参数-1输入输出端列表-2输入输出端配置23/10/26FAW-VWKUKARoboterKUKA机器人基础谢谢
提供KUKA机器人基础培训,kuka机器人基础培训教材会员下载,编号:1701027121,格式为 xlsx,文件大小为77页,请使用软件:wps,office Excel 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载