NEMA0183-协议分析
本作品内容为NEMA0183-协议分析,格式为 doc ,大小 331816 KB ,页数为 14页
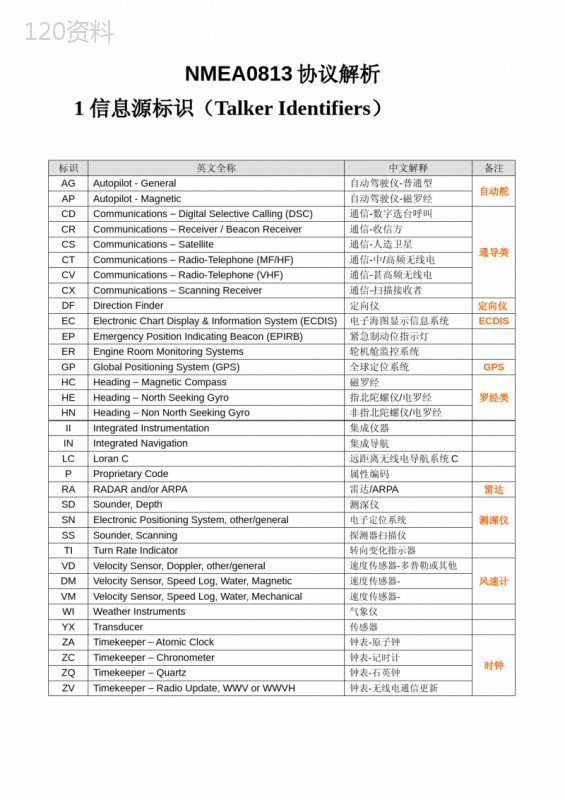
('NMEA0813协议解析1信息源标识(TalkerIdentifiers)标识英文全称中文解释备注AGAutopilot-General自动驾驶仪-普通型自动舵APAutopilot-Magnetic自动驾驶仪-磁罗经CDCommunications–DigitalSelectiveCalling(DSC)通信-数字选台呼叫通导类CRCommunications–Receiver/BeaconReceiver通信-收信方CSCommunications–Satellite通信-人造卫星CTCommunications–Radio-Telephone(MF/HF)通信-中/高频无线电CVCommunications–Radio-Telephone(VHF)通信-甚高频无线电CXCommunications–ScanningReceiver通信-扫描接收者DFDirectionFinder定向仪定向仪ECElectronicChartDisplay&InformationSystem(ECDIS)电子海图显示信息系统ECDISEPEmergencyPositionIndicatingBeacon(EPIRB)紧急制动位指示灯EREngineRoomMonitoringSystems轮机舱监控系统GPGlobalPositioningSystem(GPS)全球定位系统GPSHCHeading–MagneticCompass磁罗经罗经类HEHeading–NorthSeekingGyro指北陀螺仪/电罗经HNHeading–NonNorthSeekingGyro非指北陀螺仪/电罗经IIIntegratedInstrumentation集成仪器INIntegratedNavigation集成导航LCLoranC远距离无线电导航系统CPProprietaryCode属性编码RARADARand/orARPA雷达/ARPA雷达SDSounder,Depth测深仪测深仪SNElectronicPositioningSystem,other/general电子定位系统SSSounder,Scanning探测器扫描仪TITurnRateIndicator转向变化指示器VDVelocitySensor,Doppler,other/general速度传感器-多普勒或其他风速计DMVelocitySensor,SpeedLog,Water,Magnetic速度传感器-VMVelocitySensor,SpeedLog,Water,Mechanical速度传感器-WIWeatherInstruments气象仪YXTransducer传感器ZATimekeeper–AtomicClock钟表-原子钟时钟ZCTimekeeper–Chronometer钟表-记时计ZQTimekeeper–Quartz钟表-石英钟ZVTimekeeper–RadioUpdate,WWVorWWVH钟表-无线电通信更新2语句标识符与格式(SentenceIdentifiersandFormats)在此,只列出语句标识符及中文解释,具体格式内容详见各设备相关语句。标识英文全称中文解释备注AAMWaypointArrivalAlarm航路基准点到达警报ALMGPSAlmanacDataGPS历书数据(收集历书和卫星状态显示)APAAutopilotSentence"A"自动驾驶仪语句“A”APBAutopilotSentence"B"自动驾驶仪语句“B”BECBearing&DistancetoWaypoint–DeadReckoning到达转向点的支承距离—航位推算法BODBearing–WaypointtoWaypoint方位—转向点到转向点BWCBearingandDistancetoWaypoint–Latitude,N/S,Longitude,E/W,UTC,Status到达转向点的支承距和方位BWRBearingandDistancetoWaypoint–RhumbLineLatitude,N/S,Longitude,E/W,UTC,Status到达转向点的支承距和方位BWWBearing–WaypointtoWaypoint方位—转向点到转向点DBKDepthBelowKeel龙骨以下深度DBSDepthBelowSurface水面以下深度DBTDepthBelowTransducer传感器深度DPTHeading–Deviation&Variation船头偏离或变更FSIFrequencySetInformation频率设置信息GGAGlobalPositioningSystemFixData.Time,PositionandfixrelateddataforaGPSreceiver全球定位数据信息GLCGeographicPosition,Loran-C地理位置—远距离无线电导航系统-CGLLGeographicPosition–Latitude/Longitude地理位置—经纬度GSAGPSDOPandactivesatellitesGPS精度及当前卫星信息GSVSatellitesinview可视卫星信息GTDGeographicLocationinTimeDifferences时差中的地理位置HDGHeading–Deviation&Variation船艏向—偏离或变化HDMHeading–Magnetic磁艏向—磁罗经HDTHeading–True船艏向—真实的HSCHeadingSteeringCommand船艏向操作指令LCDLoran-CSignalData远距离无线电导航系统信号数据MSKMSKReceiverInterface(forDGPSBeaconReceivers)MSK接受接口—用于差分GPS信标接收器MTWWaterTemperature水温MWVWindSpeedandAngle风速和风向OSDOwnShipData本船数据ROOWaypointsinActiveRoute现行航线转向点RMARecommendedMinimumNavigationInformation推荐最小导航信息RMBRecommendedMinimumNavigationInformation推荐最小导航信息RMCRecommendedMinimumNavigationInformation推荐最小导航信息ROTRateOfTurn转向速率RPMRevolutions旋转RSARudderSensorAngle方向舵传感器偏角RSDRADARSystemData雷达系统数据RTERoutes航迹SFIScanningFrequencyInformation扫描频率信息STNMultipleDataID多数据IDTTMTrackedTargetMessage跟踪目标信息VBWDualGround/WaterSpeed双重对地/对水速度VDRSetandDrift固定和漂移VHWWaterSpeedandHeading水速和船艏向VLWDistanceTraveledthroughWater穿越水的距离VPWSpeed–MeasuredParalleltoWind速度—已测量的风速VTGTrackMadeGoodandGroundSpeed航迹补偿和对地速度VWRRelativeWindSpeedandAngle相对风速和偏角WCVWaypointClosureVelocity转向点终止速度WNCDistance–WaypointtoWaypoint距离—转向点到转向点WPLWaypointLocation转向点位置XDRCrossTrackError–DeadReckoning交叉航迹错误—航位推测法XTECross-TrackError–Measured交叉航迹错误—已测量XTRCrossTrackError–DeadReckoning交叉航迹错误—航位推算法ZDATime&Date–UTC,Day,Month,YearandLocalTimeZone时间&日期UTC日月年以及当地时区ZFOUTC&TimefromOriginWaypoint原始转向点的UTC时间ZTGUTC&TimetoDestinationWaypoint到达目的转向点的UTC时间3属性语句(SomeProprietarySentences)标识英文全称中文解释备注$PGRMCSensorConfigurationInformation传感器配置性息$PGRMEEstimatedPositionError位置估计错误$PGRMFPositionFixSentence安装位置语句$PGRMISensorInitialisationInformation传感器初始信息$PGRMMMapDatum图数据$PGRMOOutputSentenceEnable/Disable输出语句可用/不可用$PGRMTSensorStatusInformation传感器状态信息$PGRMV3DVelocity3d速率$PGRMZAltitudeInformation海拔信息$PSLIBDifferentalGPSBeaconReceiverControl差分GPS信标接收器控制4NMEA0813GPS相关4.1信息源GPGlobalPositioningSystem(GPS)全球定位系统4.2GPS相关语句语句开头语句标识中文解释备注$GPGGAGGAGPS定位信息(包括时间、位置等)输出语句$GPGSAGSAGPS经度及当前卫星信息输出语句$GPGSVGSV可见卫星信息输出语句$GPRMCRMC推荐最小导航信息输出语句$GPVTGVTG地面速度信息输出语句$GPGLLGLL地面定位信息输出语句$GPZDAZDA时间&日期输出语句$PGRMORMO输出语句可用/不可用属性语句-输入语句$PGRMERME位置估计错误不详$PGRMFRMF安装位置语句不详$PGRMIRMI传感器初始信息不详$PGRMMRMM图数据不详$PGRMTRMT传感器状态信息不详$PGRMVRMV3d速率不详$PGRMZRMZ海拔信息不详NMEA0183输出语句包括GGA、GSA、GSV、RMC、VTG、GLL。可通过GPS串口调试软件发送相应的命令语句给GPSOEM板,此后GPSOEM板会跟据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA语句。4.2.1GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,00007D111234567891012131415$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxxhh1)UTC时间2)纬度3)N=北纬S=南纬4)经度5)E=东经W=西经6)GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7)使用卫星号00-128)精度百分比9)大地水准面高度10)天线高度单位米11)WSG-84大地椭球体海平面相对海平面的高度,负数表示低于平均海平面12)高度单位米13)带差分GPS定位数据时间,未使用DGPS时此字段为空14)差分站ID号0000-102315)校验位4.2.2GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9091231415161718$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.xhh1)选择模式M=手动A=自动2)当前状态1=无定位信息2=2D3=3D3)使用卫星号14)使用卫星号2...14)使用卫星号1215)位置精度米16)水平精度米17)垂直精度米18)校验位4.2.3GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,791234567n$--GSV,x,x,x,x,x,x,x,...hh1)GSV语句的总数目2)当前GSV语句总数3)显示卫星的总数目4)卫星的PRV号星号5)卫星仰角6)卫星旋角/方位7)信噪比...更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰角<6>旋角<7>信噪比n)校验位4.2.4RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,0C$GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A7D121234567891011$--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,ahh1)UTC时间2)状态位V=导航报警接收器3)纬度4)N=北纬S=南纬5)经度6)E=东经W=西经7)对地速度哩/小时8)航迹度数真实9)日期日月年10)磁变度数11)E=东经W=西经12)校验位4.2.5VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K60123456789$--VTG,x.x,T,x.x,M,x.x,N,x.x,Khh1)轨迹度数2)T=真实3)轨迹度数4)M=磁罗经5)速度哩/小时6)N=哩/小时7)速度千米每小时8)K=千米每小时9)校验位4.2.6GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V3A1234567$--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,Ahh1)纬度2)N=北纬S=南纬3)经度4)E=东经W=西经5)UTC时间6)状态位A-数据有效V-数据无效7)校验位4.2.7ZDA格式解析例:$GPZDA,062321,03,02,2022,,4F1234567$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xxhh1)当地时区分钟描述,类似于当地时间2)当地时区描述0-+/-13小时3)年4)月1-125)日1-316)UTC时间7)校验位4.2.8RMO格式解析123$PGRMO,ccccc,chh1)目标语句描述2)目标语句模式0=指定语句不可用1=指定语句可用2=所有不可用3=所有输出语句可用3)校验位4.2.9RME格式解析1234567$PGRME,x.x,M,x.x,M,x.x,Mhh1)Estimatedhorizontalpositionerror(HPE)水平估计位置错误2)Unit,metres单位米3)Estimatedverticalerror(VPE)垂直估计错误4)Unit,metres单位米5)Overallsphericalequivalentpositionerror全球等效位置错误6)Unit,metres单位米7)Checksum校验位4.2.10RMF格式解析10121512345678911131416$PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,chh1)GPSweeknumber(0-1023)定位周期号0-10232)GPSseconds(0-604799)GPS秒0-6047993)UTCdateofpositionfix安装位置的UTC日期4)UTCtimeofpositionfix安装位置的UTC时间5)GPSleapsecondcountGPS闰秒数6)Latitude纬度7)NorS北纬或南纬8)Longitude经度9)EorW东经或西经10)Mode模式M=手动A=自动11)Fixtype安装类型0=未固定1=2D固定2=3D位置12)Speedoverground,0to999kilometers/hour对地速度0-999千米每小时13)Courseoverground,0to359degrees,true对地方位0-359度真实14)Positiondilutionofprecision,0to9(roundedtonearestintegervalue)位置精确百分比0-915)Timedilutionofprecision,0to9(roundedtonearestintegervalue)时间精确百分比0-916)Checksum校验位4.2.11RMI格式解析1234567$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmsshh1)Latitude纬度2)NorS北纬或南纬3)Longitude经度4)EorW东经或西经5)CurrentUTCdate当前UTC日期6)CurrentUTCtime当前UTC时间7)Checksum校验位4.2.12RMM格式解析12$PGRMM,c---chh1)Currentlyactivehorizontaldatum(WGS-84,NAD27Canada,ED50,a.s.o)现行水平数据-WGS-842)Checksum校验位4.2.13RMT格式解析12345678910$PGRMT,c...c,c,c,c,c,c,c,x.x,chh1)Product,modelandsoftwareversion产品、模型、软件版本2)RomchecksumtestROM校验检测P=通过F=失败3)Receiverfailurediscrete接收器失败P=通过F=失败4)Storeddatalost存储数据丢失R=保持L=丢失5)Realtimeclocklost真实时间丢失R=保持L=丢失6)oscillatordriftdiscrete振荡频率漂移P=通过F=检测出额外的漂移7)Datacollectiondiscrete数据搜集C=正在搜集中如果没有搜集则为NULL8)BoardtemperatureindegreesC面板温度摄氏度9)Boardconfigurationdata面板配置数据R=保持L=丢失10)Checksum校验位4.2.14RMV格式解析1234$PGRMV,x.x,x.x,x.xhh1)Trueeastvelocity,-999.9to9999.9meters/second真实的向东速率2)Truenorthvelocity,-999.9to9999.9meters/second真实的向北速率3)Upvelocity,-999.9to9999.9meters/second向上速率4)Checksum校验位4.2.15RMZ格式解析1234$PGRMZ,x.x,f,hhh1)Altitude海拔高度2)Unit,feets单位英尺3)Positionfixdimensions位置安装尺寸2useraltitude用户高度3GPSaltitudeGPS高度4)Checksum校验位5NMEA0813罗经相关5.1信息源HCHeading–MagneticCompass磁罗经HEHeading–NorthSeekingGyro指北陀螺罗经/电罗经HNHeading–NonNorthSeekingGyro非指北陀螺罗经/电罗经5.2罗经相关语句语句开头语句标识中文解释备注$HEHDTHDT航向信号输出语句$HEROTROTRateofTurn航向变化率信号输出语句$HCHDMHDM输出语句罗经分为磁罗经和电罗经两种,航海船舶一般都会安装两种罗经。我们可以将磁罗经的航向转换成电信号,即符合标准的NMEA0183语句,输送给ECDIS,ARPA,AIS,自动舵等。如果是模拟信号,如步进或同步信号,ARPA等也能直接接收。5.2.1HDT格式解析例:$HEHDT,200.0,T2D123$--HDT,x.x,Thh1)HeadingDegrees,true船艏向度数真实的2)T=TrueT=真实的3)Checksum校验位5.2.2ROT格式解析123$--ROT,x.x,Ahh1)RateOfTurn,degreesperminute,"-"meansbowturnstoport转向速率度每分负数表示向左弦转2)Status,Ameansdataisvalid状态位A=数据是有效的3)Checksum校验位5.2.3HDM格式解析123$--HDM,x.x,Mhh1)HeadingDegrees,magnetic磁艏向2)M=magneticM=磁罗经3)Checksum校验位6NMEA0813雷达相关6.1信息源RARADARand/orARPA雷达或ARPA6.2.1RSD格式解析例:$RARSD,,,,,,,,,0.847,123.7,1.500,N,H5A1412345678910111213$--RSD,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,a,ahh9)CursorRangeFromOwnShip本船指针列表10)CursorBearingDegreesClockwiseFromZero指针方位度数从0顺时针方向11)RangeScale量程刻度12)RangeUnits量程单位14)Checksum校验位6.2.2TTM格式解析例:$RATTM,02,0.823,125.0,T,7.91,184.4,T,0.709,-3.1,N,TGT02,T,,040235.18,M7D1113123456789101214$--TTM,xx,x.x,x.x,a,x.x,x.x,a,x.x,x.x,a,c--c,a,ahh1)TargetNumber目标数目2)TargetDistance目标距离3)Bearingfromownship与本船方位4)BearingUnits方位单位5)Targetspeed目标速度6)TargetCourse目标航线7)CourseUnits航线单位8)Distanceofclosest-point-of-approach最近途径的最近点的距离6.2雷达相关语句语句开头语句标识中文解释备注$RARSDRSDRADARSystemData雷达系统数据输出语句$RATTMTTMTrackedTargetMessage跟踪目标信息输出语句9)Timeuntilclosest-point-of-approach"-"meansincreasing到达最近点的时间10)"-"meansincreasing负号表示增加11)Targetname目标名称12)TargetStatus目标状态位13)ReferenceTarget参考目标14)Checksum校验位7NMEA0813测深仪相关7.1信息源SDSounder,Depth测深仪SSSounder,Scanning探测器扫描仪7.2测深仪相关语句语句开头语句标识中文解释备注$SDDBTDBTRADARSystemData雷达系统数据输出语句$SSDBTDBTDepthBelowTransducer传感器深度7.2.1DBT格式解析例:$SDDBT,00305.7,f,0093.2,M,0050.9,F03$SSDBT,44.9,f,13.6,M,7.5,F1234567$--DBT,x.x,f,x.x,M,x.x,Fhh1)Depth,feet深度英尺2)f=feetf=英尺3)Depth,meters深度米4)M=metersM=米5)Depth,Fathoms深度6英尺6)F=FathomsF=6英尺7)Checksum检查8NMEA0813风速计相关8.1信息源VDVelocitySensor,Doppler,other/general速度传感器-多普勒及其他DMVelocitySensor,SpeedLog,Water,Magnetic速度传感器VMVelocitySensor,SpeedLog,Water,Mechanical速度传感器8.2风速计相关语句语句开头语句标识中文解释备注$VDVBWVBWDualGround/WaterSpeed双重对地/水速度输出语句8.2.1VBW格式解析例:$VDVBW,2.0,,A,,,A7D1234567$--VBW,x.x,x.x,A,x.x,x.x,Ahh1)Longitudinalwaterspeed,"-"meansastern纵向水速度负号表示在船尾2)Transversewaterspeed,"-"meansport横向水速度负号表示左转舵3)Status,A=datavalid状态位A=数据有效4)Longitudinalgroundspeed,"-"meansastern纵向对地速度负号表示在船尾5)Transversegroundspeed,"-"meansport横向对地速度负号表示左转舵6)Status,A=datavalid状态位A=数据有效7)Checksum校验位9NMEA0813ECDIS相关9.1信息源ECElectronicChartDisplay&InformationSystem(ECDIS)电子海图显示信息系统9.2ECDIS相关语句语句开头语句标识中文解释备注$ECZDAZDA日期&时间输出语句$ECGGAGGAGPS定位信息$ECGLLGLL地面定位信息$ECRMCRMC推荐最小导航信息$ECVTGVTG地面速度信息9.2.1$ECZDA格式解析例:$ECZDA,050546.26,11,05,2008,,7E1234567$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xxhh1)当地时区分钟描述,类似于当地时间2)当地时区描述0-+/-13小时3)年4)月1-125)日1-316)UTC时间7)校验位9.2.2$ECGGA格式解析例:$ECGGA,050548.26,3031.461,N,11416.906,E,1,10,0.0,3.0,M,6552.0,M,0.00,053111234567891012131415$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxxhh1)UTC时间2)纬度3)N=北纬S=南纬4)经度5)E=东经W=西经6)GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7)使用卫星号00-128)精度百分比9)大地水准面高度10)天线高度单位米11)WSG-84大地椭球体海平面相对海平面的高度,负数表示低于平均海平面12)高度单位米13)带差分GPS定位数据时间,未使用DGPS时此字段为空14)差分站ID号0000-102315)校验位9.2.3$ECGLL格式解析例:$ECGLL,3031.461,N,11416.906,E,050548.26,A,A7E1234567$--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,Ahh1)纬度2)N=北纬S=南纬3)经度4)E=东经W=西经5)UTC时间6)状态位A-数据有效V-数据无效7)校验位9.2.4$ECRMC格式解析例:$ECRMC,050548.26,A,3031.461,N,11416.906,E,0.0,000.5,110508,003.5,W,A3E121234567891011$--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,ahh1)UTC时间2)状态位V=导航报警接收器3)纬度4)N=北纬S=南纬5)经度6)E=东经W=西经7)对地速度哩/小时8)航迹度数真实9)日期日月年10)磁变度数11)E=东经W=西经12)校验位9.2.5$ECVTG格式解析例:$ECVTG,000.5,T,004.0,M,0.0,N,0.0,K,A33123456789$--VTG,x.x,T,x.x,M,x.x,N,x.x,Khh1)轨迹度数2)T=真实3)轨迹度数4)M=磁罗经5)速度哩/小时6)N=哩/小时7)速度千米每小时8)K=千米每小时9)校验位',)
提供NEMA0183-协议分析会员下载,编号:1700665564,格式为 docx,文件大小为14页,请使用软件:wps,office word 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载