一种高性能EtherCAT实时以太网从站的设计
本作品内容为一种高性能EtherCAT实时以太网从站的设计,格式为 docx ,大小 41573 KB ,页数为 5页
('一种高性能EtherCAT实时以太网从站的设计施大发;刘建林;王辉;阮倩茹【摘要】介绍了新型实时工业以太网技术EtherCAT的工作原理及技术实现,通过分析ET1100芯片的结构及运行原理,设计了基于ET1100的EtherCAT以太网从站控制器(ESC),并研究了其各个接口的设计,软件实现及应用.针对所设计的系统进行了网络测试实验,结果表明了系统设计的可行性.%Anewreal-timeindustrialEthernettechnologyEtherCATisprovided.TheworkprincipleandtechnicalrealizationofEtherCATisintroduced.ThroughtheanalysisofthestructureandoperationET1100chipprinciple,EtherCATEthernetslavecontrollerbasedontheET1100isdesigned.Itseachinterfacedesign,softwarerealizationandapplicationarestudided.【期刊名称】《湖南师范大学自然科学学报》【年(卷),期】2011(034)003【总页数】4页(P37-40)【关键词】EtherCAT;从站控制器;ET1100【作者】施大发;刘建林;王辉;阮倩茹【作者单位】湖南机电职业技术学院电气工程系,中国长沙410151;湖南机电职业技术学院电气工程系,中国长沙410151;湖南大学电气与信息工程学院,中国长沙410082;湖南大学电气与信息工程学院,中国长沙410082【正文语种】中文【中图分类】TP273EtherCAT(EthernetforControlAutomationTechnology)是由德国自动控制公司Beckhoff开发的一种工业以太网技术,它基于标准的以太网技术,采用灵活的网络拓扑结构,具有配置简单、有效数据率高、全双工、易于实现等特性.EtherCAT可以用简单的线性拓扑结构来取代以太网常用的星形结构,也可以采用“传统”方式,即采用网络交换机进行布线,以便整合其他的以太网设备.主站无须专用接口卡,只需采用标准以太网卡即可实现与任何一台以太网控制器的连接.因此EtherCAT技术出色的性能打破了传统现场总线的瓶颈,实现了一种与现代工业PC的强大运算能力相匹配的通信技术[1].EtherCAT也非常适用于小型和中型的控制领域,从而为分布式I/O开辟了新的应用领域.1EtherCAT工作原理EtherCAT采用主从式结构,主站PC机采用标准的100Base-TX以太网卡,从站采用专用芯片.系统控制周期由主站发起,主站发出下行电报,电报的最大有效数据长度为1498字节.数据帧遍历所有从站设备,每个设备在数据帧经过时分析寻址到本机的报文,根据报文头中的命令读入数据或写入数据到报文中指定位置,并且从站硬件把该报文的工作计数器(WKC)加1,表示该数据被处理.整个过程会产生大约10ns的时间延迟.数据帧在访问位于整个系统逻辑位置的最后一个从站后,该从站把经过处理的数据帧做为上行电报直接发送给主站.主站收到此上行电报后,处理返回数据,一次通信结束[1].系统结构原理图如图1所示:图1EtherCAT工作原理2EtherCAT实时以太网从站总体方案设计图2EtherCAT系统从站硬件结构图设计的EtherCAT从站节点硬件包括从站协议控制器、从站CPU和网络接口等部分[2].EtherCAT从站中最关键部分是EtherCAT协议控制器,它实现EtherCAT的物理层与数据链路层的协议.现在市场上有多种EtherCAT协议控制器可供使用,如FPGA实现和ASIC实现.接口连接方式根据PDI的形式来确定.其中从站CPU实现EtherCAT对现场任务的收集与调度;EtherCAT从站控制器实现EtherCAT协议;EEPROM用于保存从站配置数据和从站描述数据;网络接口用于主从站之间或从站与从站之间的连接,根据EtherCAT从站控制器的不同网络接口可以分别为2~4个,网络接口采用标准以太网物理层器件就可以.从站的硬件实现如图2所示.3基于ET1100的EtherCAT从站结构设计3.1从站控制器ET1100的内部结构图3ET1100的内部结构功能图ET1100是一款强大的EtherCAT从站控制器ESC专用芯片,具有丰富的接口资源.它具有4个数据收发端口、8个FMMU单元、4KB控制寄存器、8KB过程数据存储器、支持64位的分布时钟功能.其内部功能结构如图3所示.3.2基于ET1100的从站硬件结构设计图4是采用Beckhoff公司的ET1100作为工业以太网EtherCAT协议通讯控制器来设计的从站[3-4].ET1100带有2个MII接口,它们在硬件上实现了EtherCAT协议的数据链路层,外扩的2个物理层芯片实现了工业以太网的的物理层.网络接口由PHY和网络变压器组成,其中网络变压器的作用是实现隔离和阻抗匹配,主站PC与从站的数据通讯速率可达到100Mbit/s[5].图4基于ET1100的EtherCAT从站结构框图3.3MII接口与EBUS接口ET1100有4个物理通信端口,分别命名为端口0到端口3,每个端口都可以配置为MII接口或EBUS接口两种形式.ET1100使用MII接口时,需要外接以太网物理层PHY芯片.PHYPORTS可由KS8721BL芯片来实现功能,PHY与ET1100之间是通过MII接口来连接的,为了降低处理/转发延时,ET1100的MII接口省略了发送FIFO.具体连接方式如图5所示[6].图5ET1100MII接口连接图3.4EEPROM接口EtherCAT从站控制器(ESC)提供多种接口规范,ESC与主机设备之间的接口方式根据过程数据接口PDI的形式确定(表1).其中,I/O方式无需主机CPU;SPI方式用于数据量较小的过程数据设备,如数据采集监控等;微处理器方式适用于现场控制,尤其是数据量较大的复杂设备.在本系统中,从站控制器采用倍福公司的ET1100.ET1100从站控制器提供3种接口规范:32位数字量输入/输出方式;8/16位同步/异步微处理器方式;串行总线SPI方式.由于电机采用TMS320F2812控制,其接口规范可选择微处理器方式,对ET1100自带的EEPROM进行编程后选择配置.控制器的EEPROM硬件连接如图6所示.表1ESC接口规范PDI形式功能I/O方式32输入/32输出24输入8输出16输入16输出8输入24输出微处理器方式8^32位微处理器SPI方式串行总线接口图6ET1100与EEPROM的连接图图7从站程序中断流程图3.5EtherCAT从站软件设计从站控制器内部有64kB的内存空间,其中前4kB(0x0000.0x0FFF)作为寄存器空间;其余的60kB作为数据交换使用.从站控制器与主站交换有2种形式的数据,一种是周期性数据,一种是非周期性的数据.周期性数据传输可以采用缓冲区方式,任何一方在任何时间都可以访问此方定义的内存,得到最新的数据;非周期性数据的传输采用握手方式(邮箱方式)实现,一方写入数据到定义的内存,只有完成定义内存的最后一个字节的写入,另一方才能开始从定义内存中读取数据,而且只有在读出定义内存的最后一个字节数据后,才能重新写入数据.通过配置SyncManager寄存器来分配内存现数据的周期和非周期性数据的传输[4].从站应用程序控制器通过中断或查询的方式存取从站控制器里的数据,执行具体的应用程序,以中断方式为例,其程序流程图如图7所示.同时从站应用程序控制器维护EtherCAT状态机,实现EtherCAT间的状态同步与切换.从站应用程序控制器可以是单片机或DSP等微控制器实现,通过串行或并行口和从站控制器相连接[7].4网络性能测试本系统通过实验板成功的构建EtherCAT从站设备,并在系统调试完成后进行性能测试.在主站侧,通过TwinCATPLC进行编程,令测试系统的函数为其中,P为位置偏移量;A为正弦幅值;Δt为离散时间间隔;n为从0到T之间变化的整数.在系统的运行过程中,利用TwinCATPLC提供的信号跟踪软件进行反馈信号的跟踪来测试网络传输的性能,图8为周期T=1s和T=2s时任意时刻所抓取的给定和反馈位置曲线图.(a)T=1s(b)T=2s图8给定和反馈位置曲线图由图8可以看到网络性能测试中反馈数据曲线的平滑性,从而可以得出EtherCAT网络数据传输的稳定性,整个网络运行状态良好,网络延迟小,可靠性高,从而验证了本设计的可行性.5结语本文利用倍福公司的从站控制芯片ET1100,提出了一种设计EtherCAT工业以太网总线从站节点的方法,介绍了一种新的工业以太网技术EtherCAT.该网络拥有杰出的通信性能,接线简单,协议开放性好,I/O响应速度快,系统软硬件集成度高.本文设计的从站方案可以单独作为从站使用,也可以融合到嵌入式系统之中.通过使用基于ET1100的实时工业以太网技术,可以大大提高系统总线的性能,为改善系统控制算法性能也提供了条件.参考文献:[1]单春荣,刘艳强,郇极.工业以太网现场总线EtherCAT及驱动程序设计[J].制造业自动化,2007,29(11):79-82.[2]向乾亮,辛志远,林继如,等.实时以太网EtherCAT技术在电力系统中的应用[J].继电器,2008,36(11):42-45.[3]谢香林,李木国.EtherCAT网络及其伺服运动控制系统研究[D].大连:大连理工大学,2008:47-53.[4]刘艳强,王健,单春荣.基于EtherCAT的多轴运动控制器研究[J].制造技术与机床,2008(6):100-103.[5]德国倍福公司.实时以态网:I/O层超高速以态网[J].自动化博览,2004,21(4):48-50.[6]EtherCATteachnicalintroductionandoverview[R].Germany:EtherCATTechnologyGroup,2007.[7]郇极,刘艳强.工业以态网现场总线EtherCAT驱动程序设计及应用[M].北京:北京航天大学出版社,2010.',)
提供一种高性能EtherCAT实时以太网从站的设计会员下载,编号:1700877791,格式为 docx,文件大小为5页,请使用软件:wps,office word 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载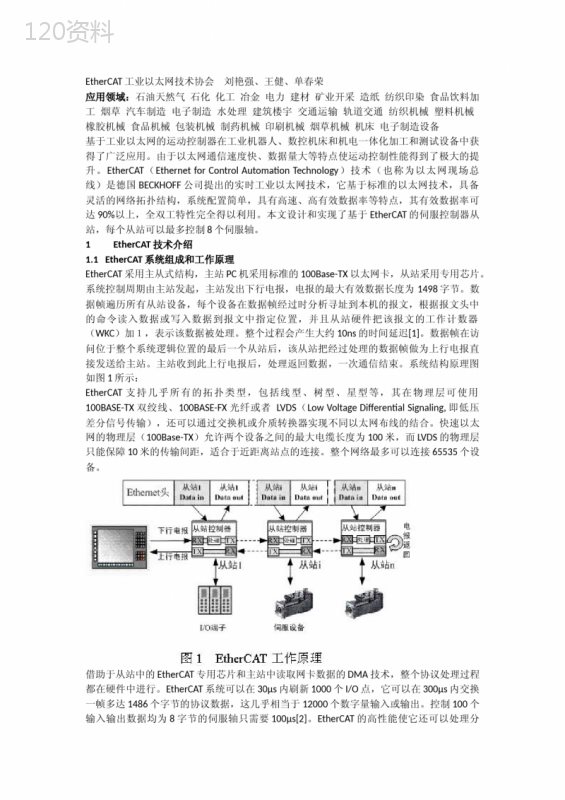 下载
下载