计算机控制系统课后答案,计算机控制系统课后答案高金源
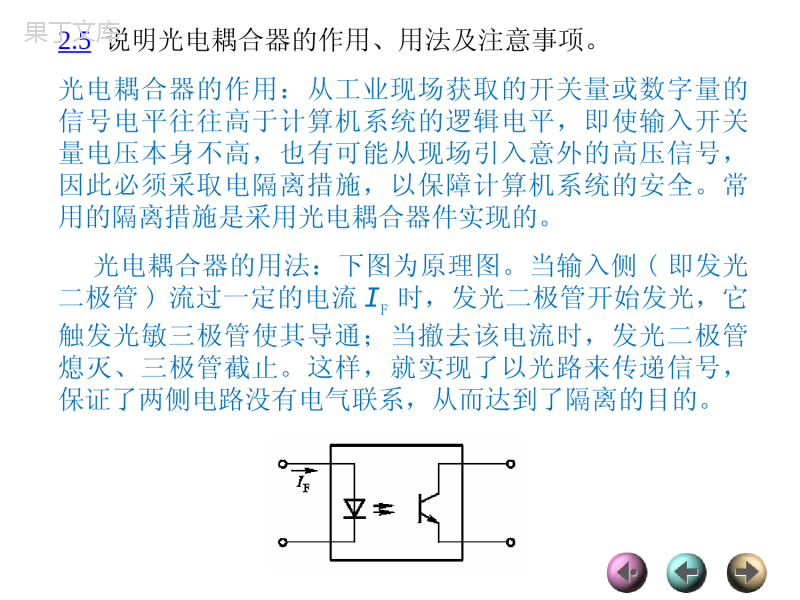
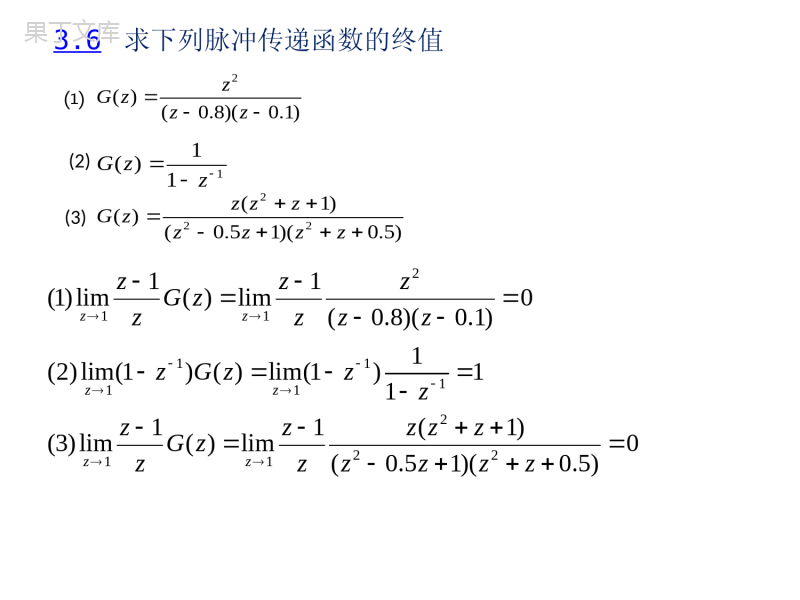
2.5说明光电耦合器的作用、用法及注意事项。光电耦合器的作用:从工业现场获取的开关量或数字量的信号电平往往高于计算机系统的逻辑电平,即使输入开关量电压本身不高,也有可能从现场引入意外的高压信号,因此必须采取电隔离措施,以保障计算机系统的安全。常用的隔离措施是采用光电耦合器件实现的。光电耦合器的用法:下图为原理图。当输入侧(即发光二极管)流过一定的电流IF时,发光二极管开始发光,它触发光敏三极管使其导通;当撤去该电流时,发光二极管熄灭、三极管截止。这样,就实现了以光路来传递信号,保证了两侧电路没有电气联系,从而达到了隔离的目的。2.5光电耦合器的注意事项:①输入侧导通电流要使光电隔离器件导通,必须在其输入侧提供足够大的导通电流,以使发光二极管发光。不同的光电隔离器件的导通电流也不同,典型的导通电流IF=10mA。②频率特性受发光二极管和光敏元件响应时间的影响,光电隔离器件只能通过一定频率以下的脉冲信号。因此,在传送高频信号时,应该考虑光电隔离器件的频率特性,选择通过频率较高的光电隔离器。③输出端工作电流光电隔离器输出端的灌电流不能超过额定值,否则就会使元件发生损坏。一般输出端额定电流在mA量级,不能直接驱动大功率外部设备,因此通常从光电隔离器至外设之间还需设置驱动电路。④输出端暗电流这是指光电隔离器处于截止状态时,流经输出端元件的电流,此值越小越好。在设计接口电路时,应考虑由于输出端暗电流而可能引起的误触发,并予以处理。⑤隔离电压它是光电隔离器的一个重要参数,表示了其电压隔离的能力。⑥电源隔离光电隔离器件两侧的供电电源必须完全隔离。无论是输入隔离还是输出隔离,只要采取光电隔离措施,就必须保证被隔离部分之间电气完全隔离,否则就起不到隔离作用了。2.15已知连续系统的开环传递函数为试求采用计算机闭环控制时采样周期的选择范围。解:将系统的开环传递函数写成从而:T1=0.25秒,1=0.04秒,1=2/32秒0.196秒。得min=0.04秒。]3204.01[25.015)(22sssKsG16004845)(2ssssKsG211111112221111(1)lim()lim0(0.8)(0.1)1(2)lim(1)()lim(1)1111(1)(3)lim()lim0(0.51)(0.5)zzzzzzzzzGzzzzzzGzzzzzzzzGzzzzzzz2()(0.8)(0.1)zGzzz11()1Gzz222(1)()(0.51)(0.5)zzzGzzzzz3.6求下列脉冲传递函数的终值⑴(2)(3)3.7用z变换求解差分方程其中初始条件为y(0)=0,y(1)=1。0)(12)1(8)2(kykyky解:对y(k+2)-8y(k+1)+12(k)=0进行z变换得(平移定理)查表得22()(0)(1)8()8(0)12()0zYzzyzyzYzzyYz21()()812(2)(6)462zzzzYzzzzzzz1()(62)4kkyk第三章习题3.8用部分分式法求下列脉冲传递函数的z反变换(1)(2)(3)(4)(5)(6)10()(1)(0.2)zGzzz(1)()(1)()aTaTezGzzze22()(1)(2)zGzzz()0.5zGzz22()(2)zGzzz2223()(2)(1)zzGzzz第三章习题答案3.8解:查表求逆z变换得查表求逆z变换得查表求逆z变换得1025(1)()[](1)(0.2)210.2zzzGzzzzz25()[10.2]2kgk(1e)(2)()(1)(e)1eaTaTaTzzzGzzzzz()1eaTgt22(3)()42(1)(2)21zzzGzzzzz()4(2)2(1)kkgk第三章习题答案(4)()0.5zGzz查表求逆z变换得查表求逆z变换得查表求逆z变换得()(0.5)kgk122121(5)()(2)12zGzzzzzz()()(2)2tTgttTtT2223(6)()(2)(1)zzGzzz()2(1)kgkTk3.11设被控对象传递函数为在对象前接有零阶保持器,试求广义对象的脉冲传递函数。第三章习题()1KGssh0ph01p111e()1e()()()(1e)()1111()[()](1)[]11e1eeTsTsTsTTTGssKKKGsGsGsssssGzZGszKzzKz3.12设线性离散系统的差分方程为试求其脉冲传递函数。第三章习题(2)2(1)1.4()4(1)()ykykykrkrk由差分方程有y(k)+2y(k-1)+1.4y(k-2)=4r(k-1)+r(k-2)求z变换得12121212()2()1.4()4()()()4()()121.4YzzYzzYzzRzzRzYzzzGzRzzz4.7设闭环离散系统如图4.18所示,其中采样期,试求系统稳定时K的取值范围。0.1sT第四章习题4.7解:由特征方程有由二次项特征方程z域直接判别法有即1()0Gz第四章习题答案368.0368.1)264.0368,0(1.0)(2zzzkzG0)0264.0368.0()368.10368.0(2kzkz26300104.0736.2)1(000264.0368.0368.10368.01)1(2410264.0368.0)0(kkwkkkwkkw240k4.8设离散系统如图4.19所示,采样周期,为零阶保持器,而要求:(1)当时,分别在z域和w域中分析系统的稳定性;(2)确定使系统稳定的K值范围。1sTh()Gsp()(0.21)KGsss5K第四章习题4.8解:Z变换得特征方程为整理得由直接判别法知时系统不稳定当时系统稳定。12120.80140.1916()11.0070.007zzGzkzz()()1()GzΦzGz1()0Gz5k2(0.80141.007)(0.19160.007)0zkzk03.304k第四章习题答案4.17设离散控制系统如图4.21所示,且a=1,K=1,T=1s求系统的单位阶跃响应。第四章习题先求脉冲传函,)()()(ZZRZY)()(1)(ZZGZG4.17解:121112111221e1e1()[][]()(1)111(1)[]111(1)()(1)11e0.3680.2641.3680.3680.3680.264()0.632()(sTsKGzsssassszssszzzzzzzzzzzzYzz闭环脉冲传递函数ZZZ2121230.3680.264)()0.63210.3680.264121.6320.632()0.368()(2)1.4(3)zzRzzzzzzzzzyktTtTtT应用长除法5.2已知模拟控制器的传递函数为采样周期T=1s,试分别采用前向差分法和后向差分法求其等效的数字控制器,并画出s域和z域对应的极点位置,说明其稳定性。c21()0.21Gsss第五章习题Tzs1Tzs11前向差分法后向差分法5.2解:前向差分法不稳定。后向差分法稳定。1c21()()1.81.8zsTDzGszz121c2()()2.22.21zsTzDzGszz第五章习题答案5.9已知某系统连续控制器的传递函数试分别用阶跃响应和脉冲响应不变法求D(z)的等效数字控制器,其中采样周期T=1s。)2)(1(2)(sssD第五章习题阶跃响应不变法:离散近似后的数字控制器的阶跃响应序列与模拟控制器的阶跃响应的采样值一致。脉冲响应不变法:离散近似后的数字控制器的脉冲响应gD(kT)是模拟控制器的脉冲响应采样值g(kT)的T倍。)]([)(SGTZzDC]1)([)1()(1SSGZZzDC1c122121())[()](1)[](1)(2)121(1)[]120.3990.5880.5030.05211()[]2[](1)(2)120.4660.5030.05DzGszsssszssszzzDzTsssszzz-1阶跃响应不变法(1-z脉冲响应不变法ZZZZZ5.9解:第五章习题答案5.12已知某连续控制器的传递函数为现用数字PID算法实现它,试写出其相应的增量型PID算法输出表达式。设采样周期T=1s。sssD085.017.01)(第五章习题1c11c11110.17()0.08513.762()()()1()13.762zsTiiiisGsszUzDzGszEzuuee第六章习题答案6.1什么是最少拍系统?最少拍系统有什么不足之处?解:最少拍控制系统是指系统在典型输入信号作用下,经过最少拍使系统输出稳态误差为零。不足之处:只针对某种典型输入进行设计,当输入形式改变时,系统性能变坏,输出响应不一定理想。6.2设不稳定对象试对单位阶跃输入设计最少拍有纹波控制器。112.2()11.2zGzz1110111()(1)()umqviqvizzbzcczcz其中,m为广义对象G(z)的瞬变滞后,该滞后只能予以保留(不包括延迟环节时m=1);bi为G(z)在z平面的不稳定零点;u为G(z)不稳定零点数;v为G(z)不稳定的极点数(z=1极点除外);q分别取1,2,3;ci为q+v个待定系数,ci(i=0,1,2,…,q+v-1)应满足下式:e()1()zz第六章习题答案6.2解:由知则112.2()11.2zGzz01m=11uvp1101010101121212()()(1)121(1)20()2()1.2()0.09(1())()(1)zzcczcccccczzzzzzDzzGzz解得因此6.10大林算法与PID算法之间有什么关系?解:如果被控对象存在纯时间滞后,则对其控制的难度往往较大。如果在这种情况下,对系统的要求是无超调量或超调量很小,并且允许有较长的调节时间,则大林算法的控制效果往往比PID等控制算法具有更好的效果。第六章习题6.12某电阻炉,其传递函数可近似为带纯滞后的一阶惯性环节用飞行曲线法测得电阻炉的有关参数如下:若采用零阶保持器,取采样周期T=6s,要求闭环系统的时间常数用大林算法求取对电阻炉实现温度控制的数字控制器的算式τdd()e1sKGsTsdd1.16,τ30s,680sKTτ350Ts29大林(Dahlin)算法不论是对一阶惯性对象还是对二阶惯性对象,大林算法的设计目标都是使闭环传递函数Φ(s)相当于一个纯滞后环节和一个惯性环节的串联,其中纯滞后环节的滞后时间τ与被控对象的纯滞后时间完全相同。这样就能保证使系统不产生超调,同时保证其稳定性。因此式中,Tc为理想闭环系统的一阶惯性时间常数。c1()e1ssTs第六章习题答案6.12解:ddcddccτdpdτ(1)ddd111(1)d116()e11e1e()[e]11e(1e)(1e)()(1e)[1e(1e)1.628(10.991)10.9830.17sTTTsNTTTTTTTTTTTTNKGsTsKsGzKzsTszzDzKzzzzz求得大林控制器Z)(1)(1)()(zGzzzD7.2求下述脉冲传递函数所述系统的状态空间表达式,并画出系统的方块图。)2()1(5)()(2zzzUzY第七章习题第七章习题答案7.2解:得系统差分方程:设得动态方程232()55()(1)(2)452YzUzzzzzz(3)4(2)5(1)2()5()ykykykykuk1()()xkyk,2()(1)xkyk,3()(2)xkyk122331231(1)()(1)()(1)2()5()4()5()(1)()xkxkxkxkxkxkxkxkukykxk第七章习题答案状态空间表达式为:0100(1)001()0()2545()100()xkxkukykxk7.10给定被控对象确定状态反馈增益矩阵K,使系统具有闭环极点:)(10)()(116.010)1()1(2121kukxkxkxkx120.6j0.4,0.6j0.4zz第七章习题35经过状态反馈后的闭环系统的状态矩阵和输入矩阵分别为闭环系统特征方程为0112231010000100001nnAbKakakakak0001b111201()()()()()0nnnnfzzIAbKzakzakzak基于状态反馈的单输入系统极点配置方法3612,,,nzzz1211212()()()()(1)()(1)0nnnnnnfzzzzzzzzzzzzzzz2110211)1())(1(nnnnnzzzkazzzka设闭环系统的期望极点为则系统的期望特征方程为令上两式中的各项次幂系数对应相等,即即可得到状态反馈增益矩阵K。基于状态反馈的单输入系统极点配置方法第七章习题答案7.10解:设系数对应相等有得12Kkk12221()()10.161(1)(0.16)0fzzIAbKzkzkzkzk2()(0.60.4)(0.60.4)1.20.20fzzjzjzz2111.20.160.2kk0.360.2K
提供计算机控制系统课后答案,计算机控制系统课后答案高金源会员下载,编号:1701026681,格式为 xlsx,文件大小为38页,请使用软件:wps,office Excel 进行编辑,PPT模板中文字,图片,动画效果均可修改,PPT模板下载后图片无水印,更多精品PPT素材下载尽在某某PPT网。所有作品均是用户自行上传分享并拥有版权或使用权,仅供网友学习交流,未经上传用户书面授权,请勿作他用。若您的权利被侵害,请联系963098962@qq.com进行删除处理。

 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载 下载
下载